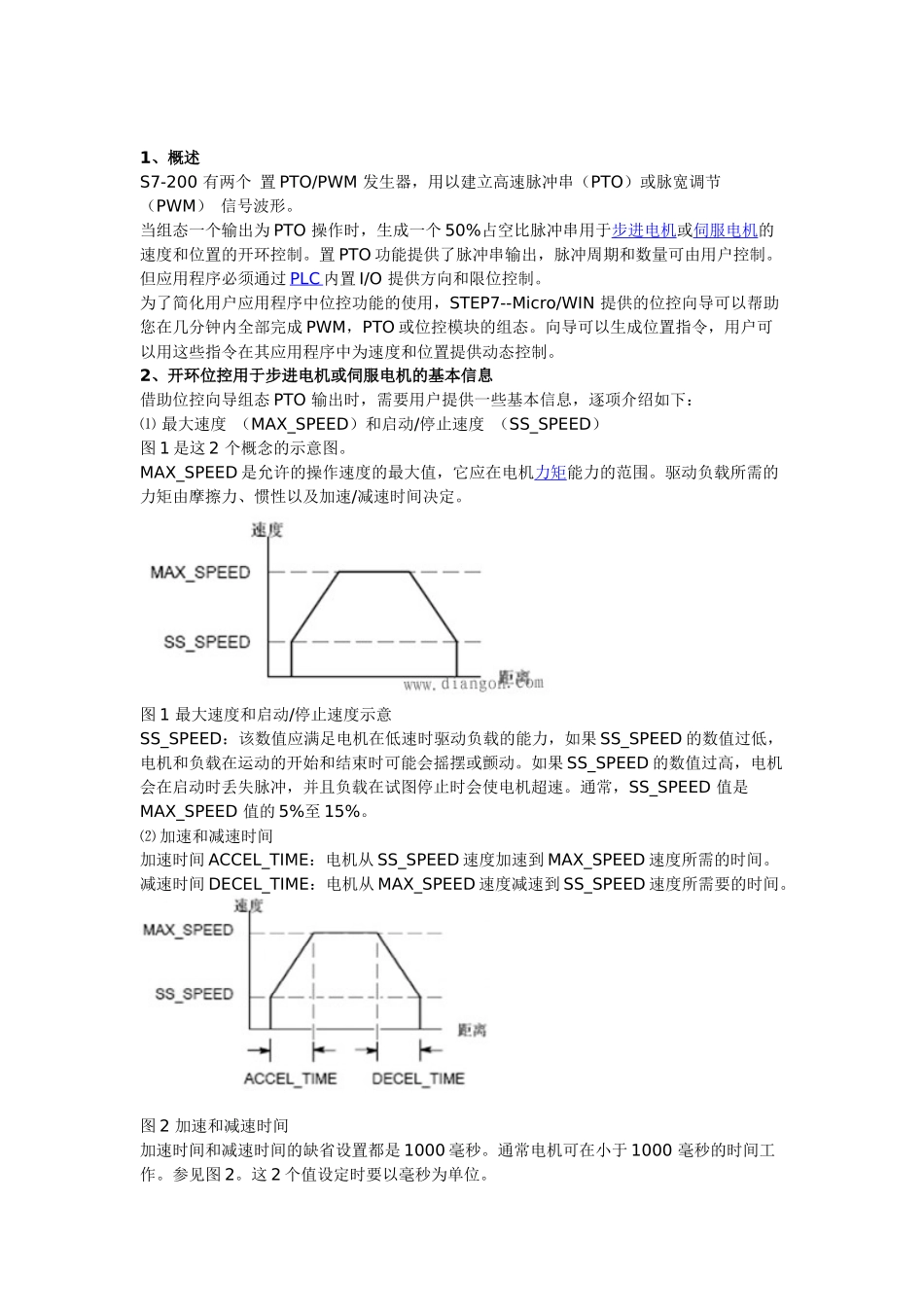
1、概述S7-200有两个置PTO/PWM发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。当组态一个输出为PTO操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。置PTO功能提供了脉冲串输出,脉冲周期和数量可由用户控制。但应用程序必须通过PLC内置I/O提供方向和限位控制。为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO或位控模块的组态。向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。2、开环位控用于步进电机或伺服电机的基本信息借助位控向导组态PTO输出时,需要用户提供一些基本信息,逐项介绍如下:⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)图1是这2个概念的示意图。MAX_SPEED是允许的操作速度的最大值,它应在电机力矩能力的范围。驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。图1最大速度和启动/停止速度示意SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。如果SS_SPEED的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。通常,SS_SPEED值是MAX_SPEED值的5%至15%。⑵加速和减速时间加速时间ACCEL_TIME:电机从SS_SPEED速度加速到MAX_SPEED速度所需的时间。减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。图2加速和减速时间加速时间和减速时间的缺省设置都是1000毫秒。通常电机可在小于1000毫秒的时间工作。参见图2。这2个值设定时要以毫秒为单位。注意:电机的加速和失速时间要过测试来确定。开始时,您应输入一个较大的值。逐渐减少这个时间值直至电机开始失速,从而优化您应用中的这些设置。⑶移动包络一个包络是一个预先定义的移动描述,它包括一个或多个速度,影响着从起点到终点的移动。一个包络由多段组成,每段包含一个达到目标速度的加速/减速过程和以目标速度匀速运行的一串固定数量的脉冲。位控向导提供移动包络定义界面,在这里,您可以为您的应用程序定义每一个移动包络。PTO支持最大100个包络。定义一个包络,包括如下几点:①选择操作模式;②为包络的各步定义指标。③为包络定义一个符号名。⑴选择包络的操作模式:PTO支持相对位置和单一速度的续转动,如图3所示,相对位置模式指的是运动的终点位置是从起点侧开始计算的脉冲...