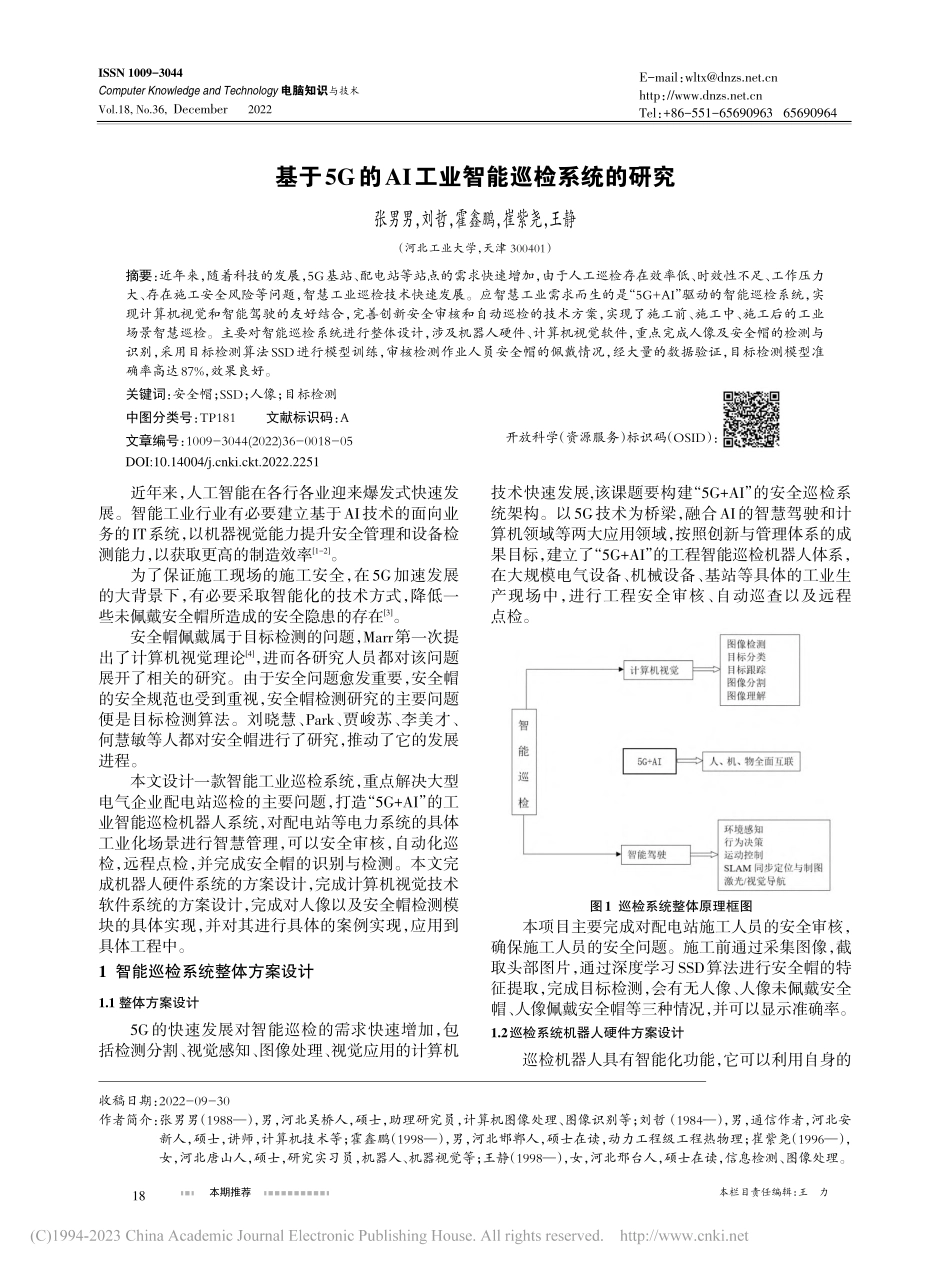
本栏目责任编辑:王力本期推荐ComputerKnowledgeandTechnology电脑知识与技术第18卷第36期(2022年12月)基于5G的AI工业智能巡检系统的研究张男男,刘哲,霍鑫鹏,崔紫尧,王静(河北工业大学,天津300401)摘要:近年来,随着科技的发展,5G基站、配电站等站点的需求快速增加,由于人工巡检存在效率低、时效性不足、工作压力大、存在施工安全风险等问题,智慧工业巡检技术快速发展。应智慧工业需求而生的是“5G+AI”驱动的智能巡检系统,实现计算机视觉和智能驾驶的友好结合,完善创新安全审核和自动巡检的技术方案,实现了施工前、施工中、施工后的工业场景智慧巡检。主要对智能巡检系统进行整体设计,涉及机器人硬件、计算机视觉软件,重点完成人像及安全帽的检测与识别,采用目标检测算法SSD进行模型训练,审核检测作业人员安全帽的佩戴情况,经大量的数据验证,目标检测模型准确率高达87%,效果良好。关键词:安全帽;SSD;人像;目标检测中图分类号:TP181文献标识码:A文章编号:1009-3044(2022)36-0018-05开放科学(资源服务)标识码(OSID):近年来,人工智能在各行各业迎来爆发式快速发展。智能工业行业有必要建立基于AI技术的面向业务的IT系统,以机器视觉能力提升安全管理和设备检测能力,以获取更高的制造效率[1-2]。为了保证施工现场的施工安全,在5G加速发展的大背景下,有必要采取智能化的技术方式,降低一些未佩戴安全帽所造成的安全隐患的存在[3]。安全帽佩戴属于目标检测的问题,Marr第一次提出了计算机视觉理论[4],进而各研究人员都对该问题展开了相关的研究。由于安全问题愈发重要,安全帽的安全规范也受到重视,安全帽检测研究的主要问题便是目标检测算法。刘晓慧、Park、贾峻苏、李美才、何慧敏等人都对安全帽进行了研究,推动了它的发展进程。本文设计一款智能工业巡检系统,重点解决大型电气企业配电站巡检的主要问题,打造“5G+AI”的工业智能巡检机器人系统,对配电站等电力系统的具体工业化场景进行智慧管理,可以安全审核,自动化巡检,远程点检,并完成安全帽的识别与检测。本文完成机器人硬件系统的方案设计,完成计算机视觉技术软件系统的方案设计,完成对人像以及安全帽检测模块的具体实现,并对其进行具体的案例实现,应用到具体工程中。1智能巡检系统整体方案设计1.1整体方案设计5G的快速发展对智能巡检的需求快速增加,包括检测分割、视觉感知、图像处理、视觉应用的计算机技术快速发展,该课题要构建“5G+AI”...