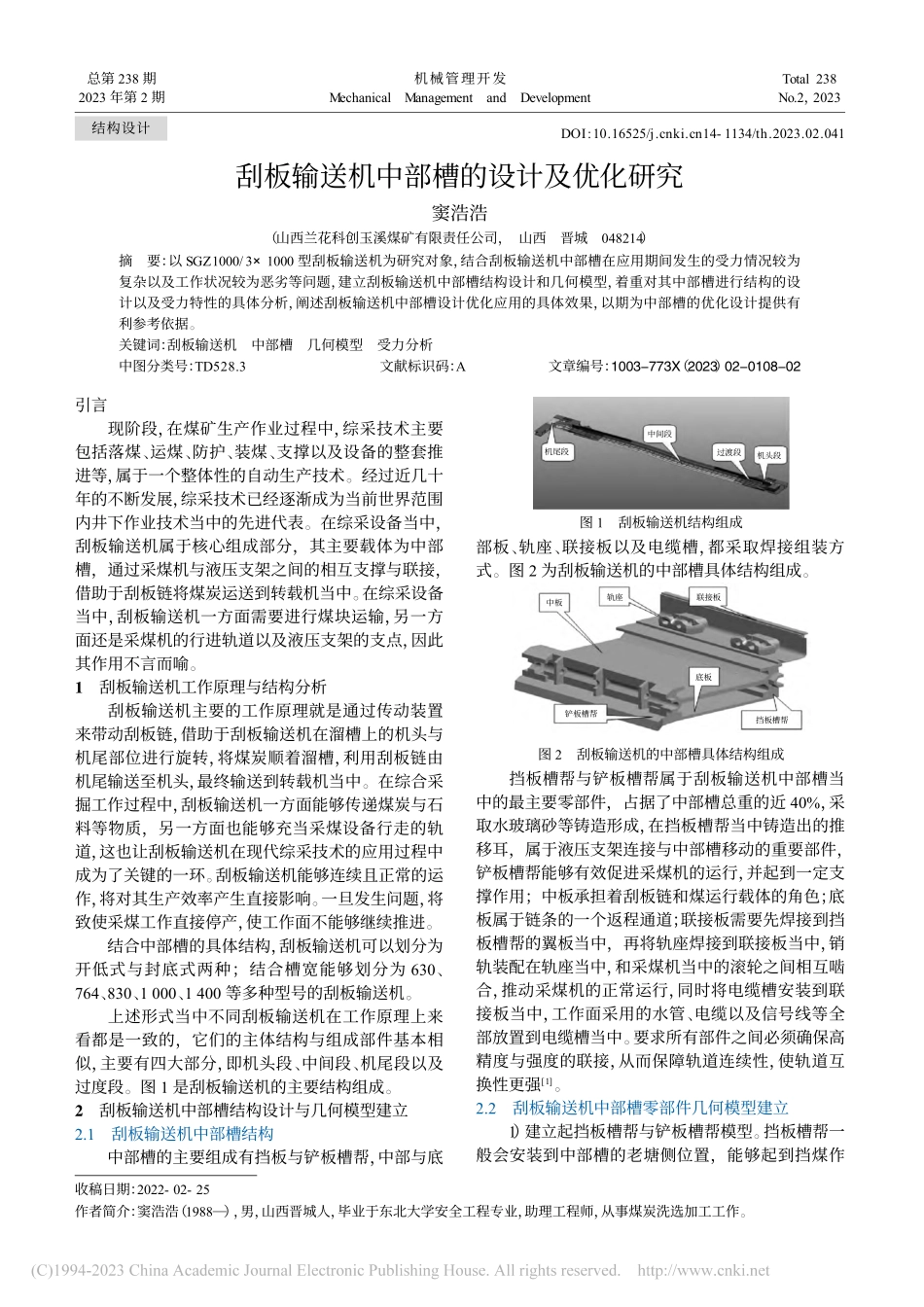
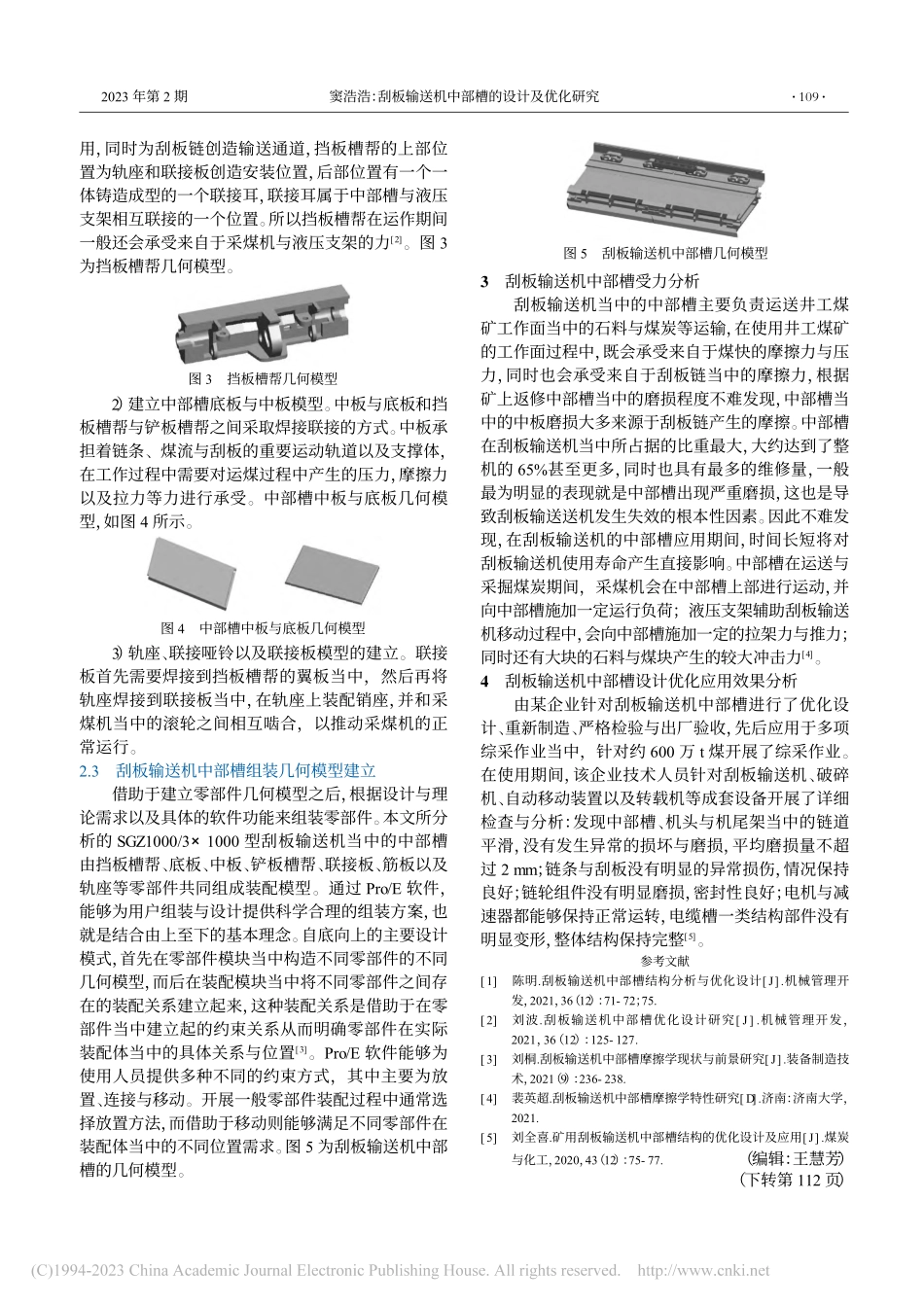
刮板输送机中部槽的设计及优化研究窦浩浩(山西兰花科创玉溪煤矿有限责任公司,山西晋城048214)摘要:以SGZ1000/3×1000型刮板输送机为研究对象,结合刮板输送机中部槽在应用期间发生的受力情况较为复杂以及工作状况较为恶劣等问题,建立刮板输送机中部槽结构设计和几何模型,着重对其中部槽进行结构的设计以及受力特性的具体分析,阐述刮板输送机中部槽设计优化应用的具体效果,以期为中部槽的优化设计提供有利参考依据。关键词:刮板输送机中部槽几何模型受力分析中图分类号:TD528.3文献标识码:A文章编号:1003-773X(2023)02-0108-02引言现阶段,在煤矿生产作业过程中,综采技术主要包括落煤、运煤、防护、装煤、支撑以及设备的整套推进等,属于一个整体性的自动生产技术。经过近几十年的不断发展,综采技术已经逐渐成为当前世界范围内井下作业技术当中的先进代表。在综采设备当中,刮板输送机属于核心组成部分,其主要载体为中部槽,通过采煤机与液压支架之间的相互支撑与联接,借助于刮板链将煤炭运送到转载机当中。在综采设备当中,刮板输送机一方面需要进行煤块运输,另一方面还是采煤机的行进轨道以及液压支架的支点,因此其作用不言而喻。1刮板输送机工作原理与结构分析刮板输送机主要的工作原理就是通过传动装置来带动刮板链,借助于刮板输送机在溜槽上的机头与机尾部位进行旋转,将煤炭顺着溜槽,利用刮板链由机尾输送至机头,最终输送到转载机当中。在综合采掘工作过程中,刮板输送机一方面能够传递煤炭与石料等物质,另一方面也能够充当采煤设备行走的轨道,这也让刮板输送机在现代综采技术的应用过程中成为了关键的一环。刮板输送机能够连续且正常的运作,将对其生产效率产生直接影响。一旦发生问题,将致使采煤工作直接停产,使工作面不能够继续推进。结合中部槽的具体结构,刮板输送机可以划分为开低式与封底式两种;结合槽宽能够划分为630、764、830、1000、1400等多种型号的刮板输送机。上述形式当中不同刮板输送机在工作原理上来看都是一致的,它们的主体结构与组成部件基本相似,主要有四大部分,即机头段、中间段、机尾段以及过度段。图1是刮板输送机的主要结构组成。2刮板输送机中部槽结构设计与几何模型建立2.1刮板输送机中部槽结构中部槽的主要组成有挡板与铲板槽帮,中部与底部板、轨座、联接板以及电缆槽,都采取焊接组装方式。图2为刮板输送机的中部槽具体结构组成。挡板槽帮与铲板槽帮属于刮板输送机中部槽当中的...