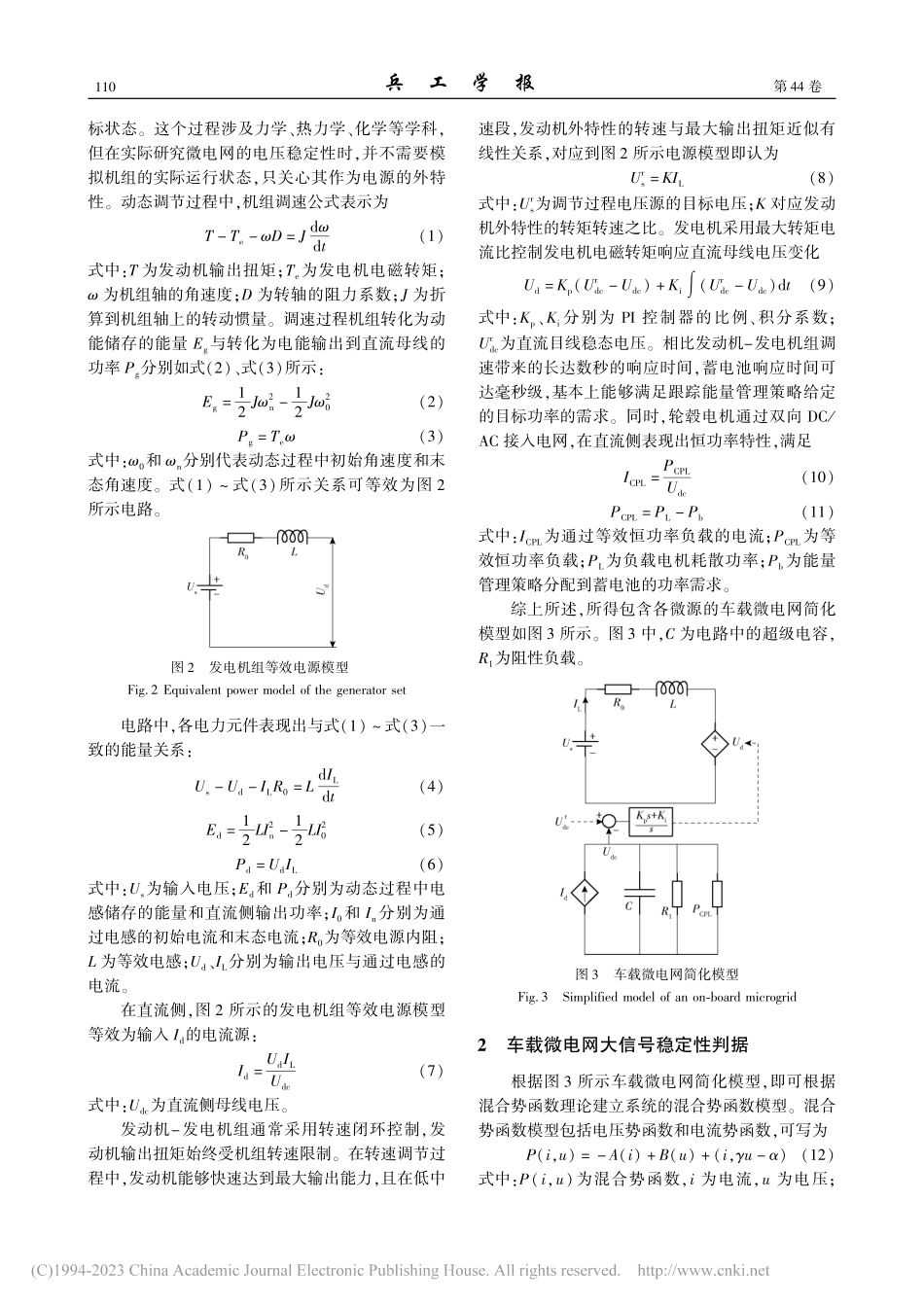
第44卷第1期2023年1月兵工学报ACTAARMAMENTARIIVol.44No.1Jan.2023DOI:10.12382/bgxb.2022.0472混合动力装甲车直流微电网大信号稳定性分析徐浩轩,马晓军,刘春光(陆军装甲兵学院兵器与控制系,北京100072)摘要:混合动力装甲车直流微电网的电能质量与稳定性关系到车内所有用电设备是否能够安全可靠运行。针对混合动力装甲车辆车载微电网在大扰动下母线电压震荡乃至失稳的现象,建立计及恒功率负载与发电机组的车载微电网的大扰动模型;基于混合势函数理论得到车载微电网稳定性判据,解决了现有大扰动分析方法不适应混合动力装甲车辆车载微电网的问题,并分析了微电网重要参数与响应速度及稳定性之间的关系。通过硬件在环仿真及台架试验验证了稳定性判据及分析结果的可靠性。结果表明:在大扰动下,满足该判据的系统能够稳定运行。关键词:混合动力汽车;直流微电网;混合势函数;稳定性分析中图分类号:TJ810.2文献标志码:A文章编号:1000⁃1093(2023)01⁃0108⁃09Large⁃SignalStabilityofOn⁃boardDCMicrogridsforHybridElectricArmoredVehiclesXUHaoxuan,MAXiaojun,LIUChunguang(WeaponsandControlDepartment,ArmyAcademyofArmoredForces,Beijing100072,China)Abstract:Thepowerqualityandstabilityofanon⁃boardDCmicrogridarerelatedtowhethertheelectricalequipmentinthevehiclecanworksafelyandreliably.Aimingattheproblemofbusvoltageoscillationandinstabilityofon⁃boardDCmicrogridsunderlargedisturbances,alarge⁃disturbancemodelofanon⁃boardDCmicrogridthatconsidersconstantpowerloadandengine⁃generatorisestablished.Basedonthemixe...