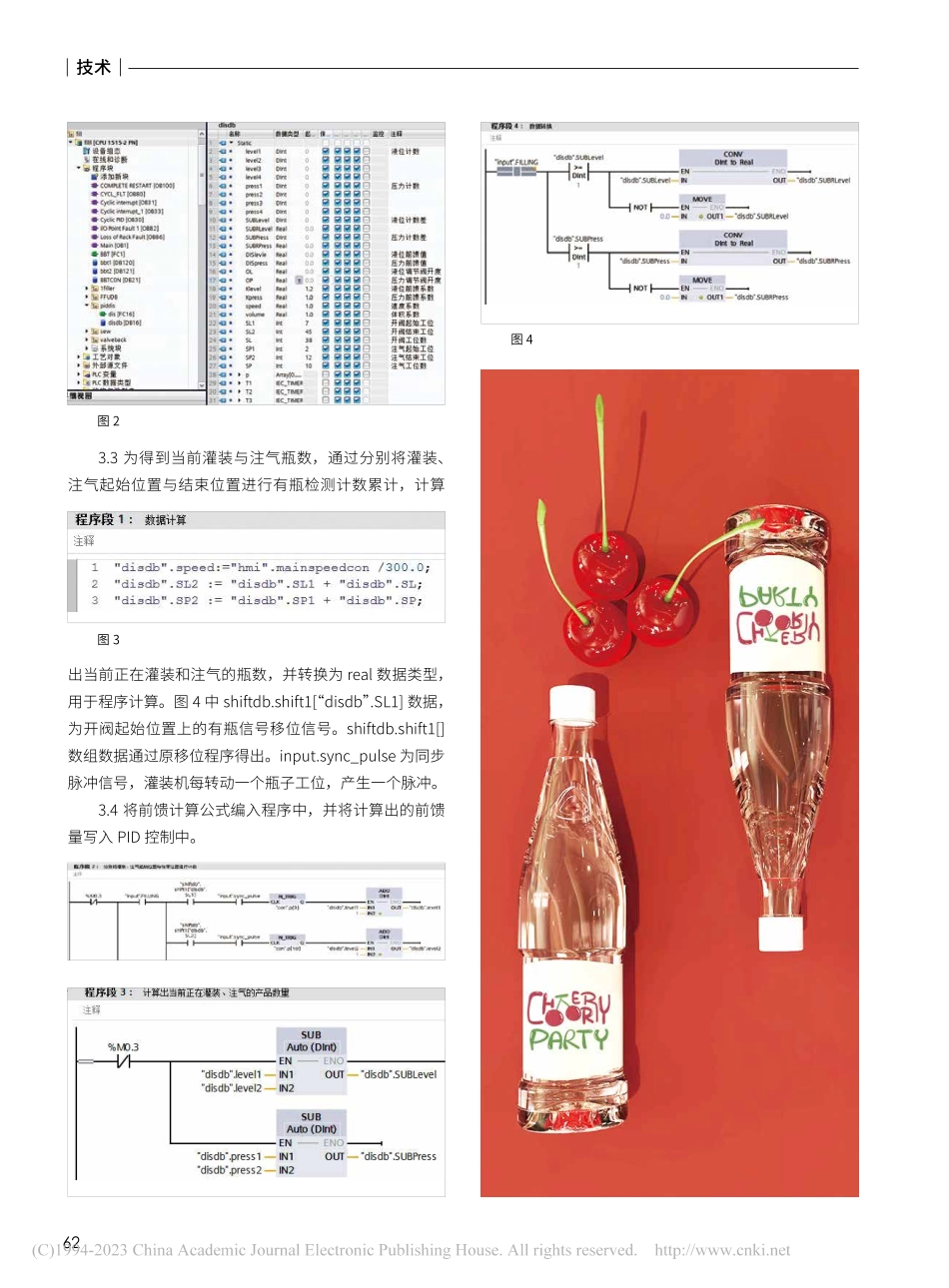
含气饮料啤酒灌装液位与压力的前馈控制应用FeedforwardControlApplicationofFillerLevelandPressureinAeratedBeverageandBeerFillerAbstract:Tosolvetheproblemofunstablefillinginbeerandbeveragefillingmachine、Largefluctuationofliquidlevelandpressure,seriouswasteofmaterials,etc.ThecontrolschemeadoptedinthisprojectistoapplyavariablefeedforwarddisturbancecontrolquantitytothepositionoftheoriginaltraditionalPIDcontroloutputstage.Thisquantitycanmoreintelligentlycalculatetheopeningofproportionalvalvestoincreaseordecreaseinadvancethanthecurrentfillingquantity.Keywords:Filler;PIDcontrol;feedforwardcontrol;shiftcount;SiemensTIA1引言灌装缸液位高度和背压压力的稳定性将直接影响产品的质量,以及物料和能源的利用率,所以保证液位和背压压力的稳定十分必要。分析研究认为,灌装缸液位和压力的稳定是影响灌装稳定性的主要原因之一。影响液位稳定性的主要原因是进液比例阀控制滞后所导致,影响背压压力稳定性的主要原因是液位不稳定和进气比例阀控制滞后。2液位压力PID控制分析液位控制由灌装缸液位检测传感器和进液调节阀进行PID调节控制,具体模型如图1。灌装缸压力控制由灌装缸压力检测传感器和CO2进气调节阀进行PID调节控制,模型同理液位控制。此课题主要以液位控制来阐述,压力控制同理液位控制。摘要:为解决啤酒饮料灌装机灌装不稳定、缸液位压力波动大、物料浪费严重等问题。此课题采取的控制方案是在原传统PID控制输出级的位置上施加一个可变的前馈扰动控制量,能够根据灌装数量智能计算出比例阀要提前增加或减少的开度。关键词:灌装机;PID控制;前馈控制;移位计数;西门子TIA许智辉张晓飞孙仕龙技术60灌装机因故障停机或止瓶时,在灌装瓶迅速减少,灌装缸中原料消耗量迅速减少,液位调节阀无法迅速反应减小关闭,导致液位偏高。压力同样增高,在叠加液位增高的影响下,压力会进一步增高,可能导致排气阀打开,造成CO2额外消耗。当灌装机停机故障或止瓶故障解除后,灌装机灌装瓶量迅速增加,液位调节阀无法迅速反应加大调节阀开度,导致液位出现短暂偏低现象,压力同样出现偏低,影响灌装质量。此时仅通过调节PID参数,无法解决该问题。灌装机在固定瓶型固定速度下连续稳定生产时(例如速度300B/M,容量1000ML,将此时的速度、容量系数记为1),灌装缸液位、压力均稳定在设定值附近,此时进液调节阀、CO2进...