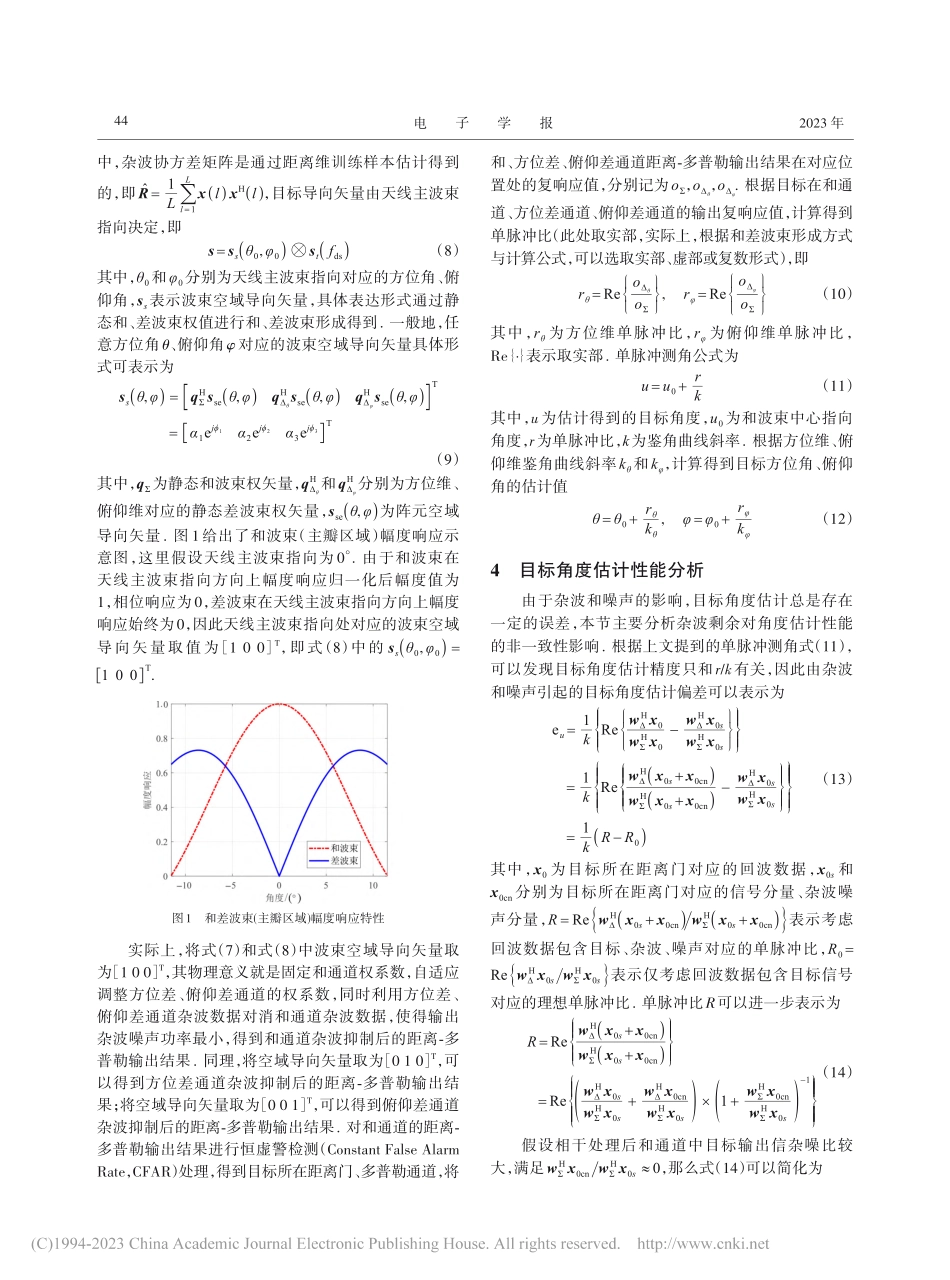
第1期2023年1月电子学报ACTAELECTRONICASINICAVol.51No.1Jan.2023和差天线空时自适应测角方法及性能分析阚庆云,许京伟,廖桂生(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)摘要:雷达模拟和差天线技术通过射频功率合成器形成和差波束,在目标角度测量中应用广泛,然而运动平台雷达经过空时自适应处理(Space-TimeAdaptiveProcessing,STAP)后难以还原鉴角曲线,即自适应处理后的等效鉴角曲线与静态鉴角曲线发生偏离.针对此问题,本文提出和差天线体制雷达空时自适应测角方法.该方法通过和差STAP算法抑制杂波后实现角度估计,并且通过理论推导建立了角度估计与和通道输出信噪比、差通道剩余杂噪比之间的关系,重点分析了杂波剩余对角度估计的非一致性影响.仿真实验验证了本文方法的有效性.关键词:运动平台雷达;和差天线体制;空时自适应处理;杂波抑制;单脉冲测角基金项目:国家自然科学基金(No.61931016,No.62071344)中图分类号:TN959.73文献标识码:A文章编号:0372-2112(2023)01-0042-08电子学报URL:http://www.ejournal.org.cnDOI:10.12263/DZXB.20211458AngleEstimationApproachandPerformanceAnalysisforSTAPwithSum-DifferenceAntennaKANQing-yun,XUJing-wei,LIAOGui-sheng(NationalLaboratoryofRadarSignalProcessing,XidianUniversity,Xi’an,Shaanxi710071,China)Abstract:Analogsum-differenceantennaradarformssum-differencebeamthroughradiofrequencypowersynthe⁃sizer,whichiswidelyusedintargetangleestimation.However,afterspace-timeadaptiveprocessing(STAP),itisdifficultformovingplatformradartorestoretheangleidentificationcurve,thatis,theequivalentangleidentificationcurveafteradaptiveprocessingdeviatesfromthestaticangleidentificationcurve.Tosolvethisproblem,thispaperproposesaspace-timeadaptiveangleestimationmethodforSTAPwithsum-differenceantennasystem.Inthismethod,theangleestimationisrealizedaftersuppressingclutterbysum-differenceSTAPalgorithm.Therelationshipbetweenangleestimationandtheoutputsignal-to-noiseratioofthesumchannel,residualclutter-to-noiseratioofthedifferencechannelisestablishedbythe⁃oreticaldeduction.Thispaperanalyzestheinfluenceofclutterresidueontheinconsistencyofangleestimationemphatical⁃ly.Simulationresultsver...