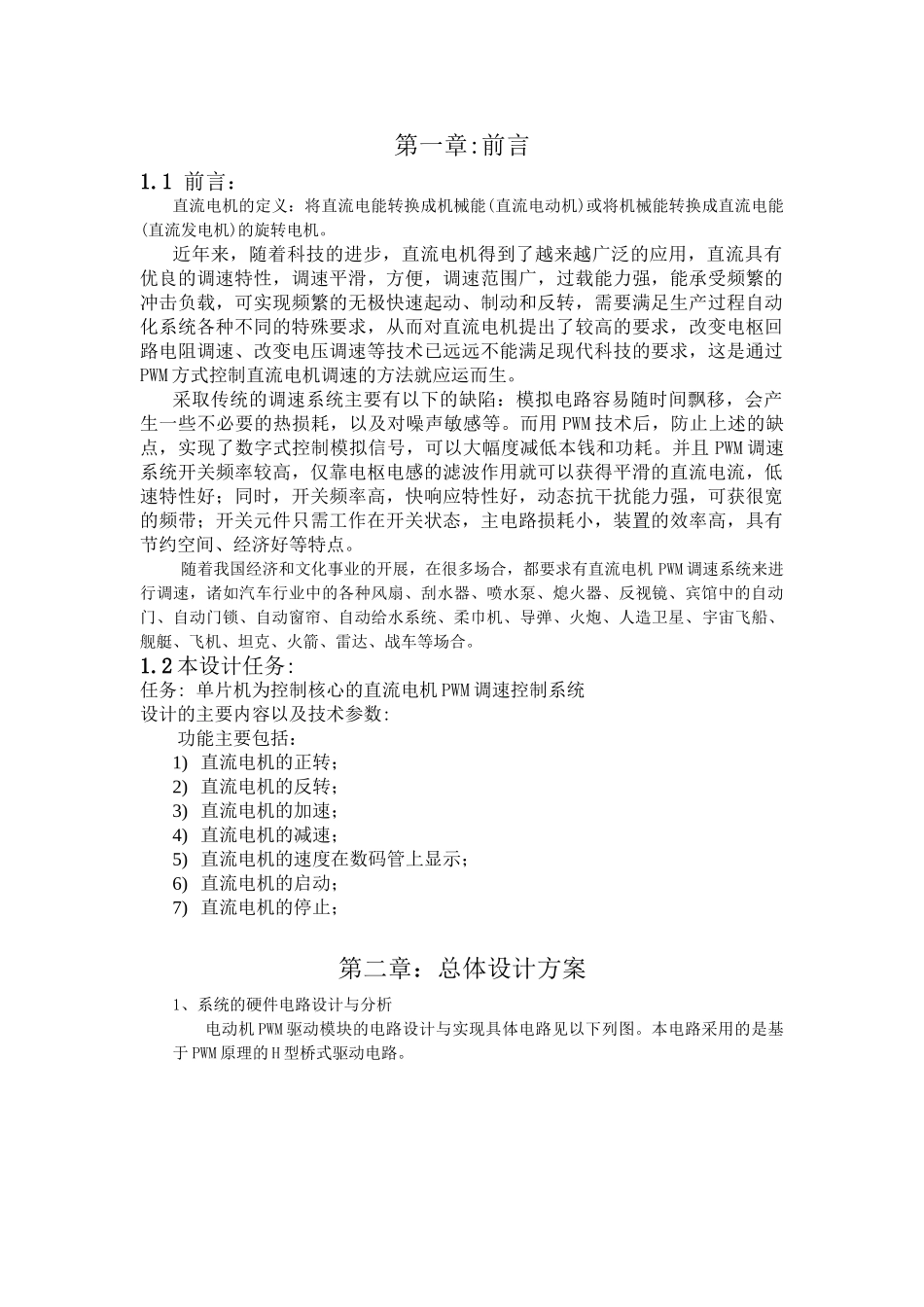
第一章:前言1.1前言:直流电机的定义:将直流电能转换成机械能(直流电动机)或将机械能转换成直流电能(直流发电机)的旋转电机。近年来,随着科技的进步,直流电机得到了越来越广泛的应用,直流具有优良的调速特性,调速平滑,方便,调速范围广,过载能力强,能承受频繁的冲击负载,可实现频繁的无极快速起动、制动和反转,需要满足生产过程自动化系统各种不同的特殊要求,从而对直流电机提出了较高的要求,改变电枢回路电阻调速、改变电压调速等技术已远远不能满足现代科技的要求,这是通过PWM方式控制直流电机调速的方法就应运而生。采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。而用PWM技术后,防止上述的缺点,实现了数字式控制模拟信号,可以大幅度减低本钱和功耗。并且PWM调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。随着我国经济和文化事业的开展,在很多场合,都要求有直流电机PWM调速系统来进行调速,诸如汽车行业中的各种风扇、刮水器、喷水泵、熄火器、反视镜、宾馆中的自动门、自动门锁、自动窗帘、自动给水系统、柔巾机、导弹、火炮、人造卫星、宇宙飞船、舰艇、飞机、坦克、火箭、雷达、战车等场合。1.2本设计任务:任务:单片机为控制核心的直流电机PWM调速控制系统设计的主要内容以及技术参数:功能主要包括:1)直流电机的正转;2)直流电机的反转;3)直流电机的加速;4)直流电机的减速;5)直流电机的速度在数码管上显示;6)直流电机的启动;7)直流电机的停止;第二章:总体设计方案1、系统的硬件电路设计与分析电动机PWM驱动模块的电路设计与实现具体电路见以下列图。本电路采用的是基于PWM原理的H型桥式驱动电路。PWM电路由复合体管组成H型桥式电路构成,四局部晶体管以对角组合分为两组:根据两个输入端的上下电平决定晶体管的导通和截止。4个二极管在电路中起防止晶体管产生反向电压的保护作用,防止电动机两端的电流和晶体管上的电流过大的保护作用。在实验中的控制系统电压统一为5v电源,因此假设复合管基极由控制系统直接控制,那么控制电压最高为5V,再加上三极管本身压降,加到电动机两端的电压就只有4V左右,严重减弱了电动机的驱动力。基于上述考虑,我们...