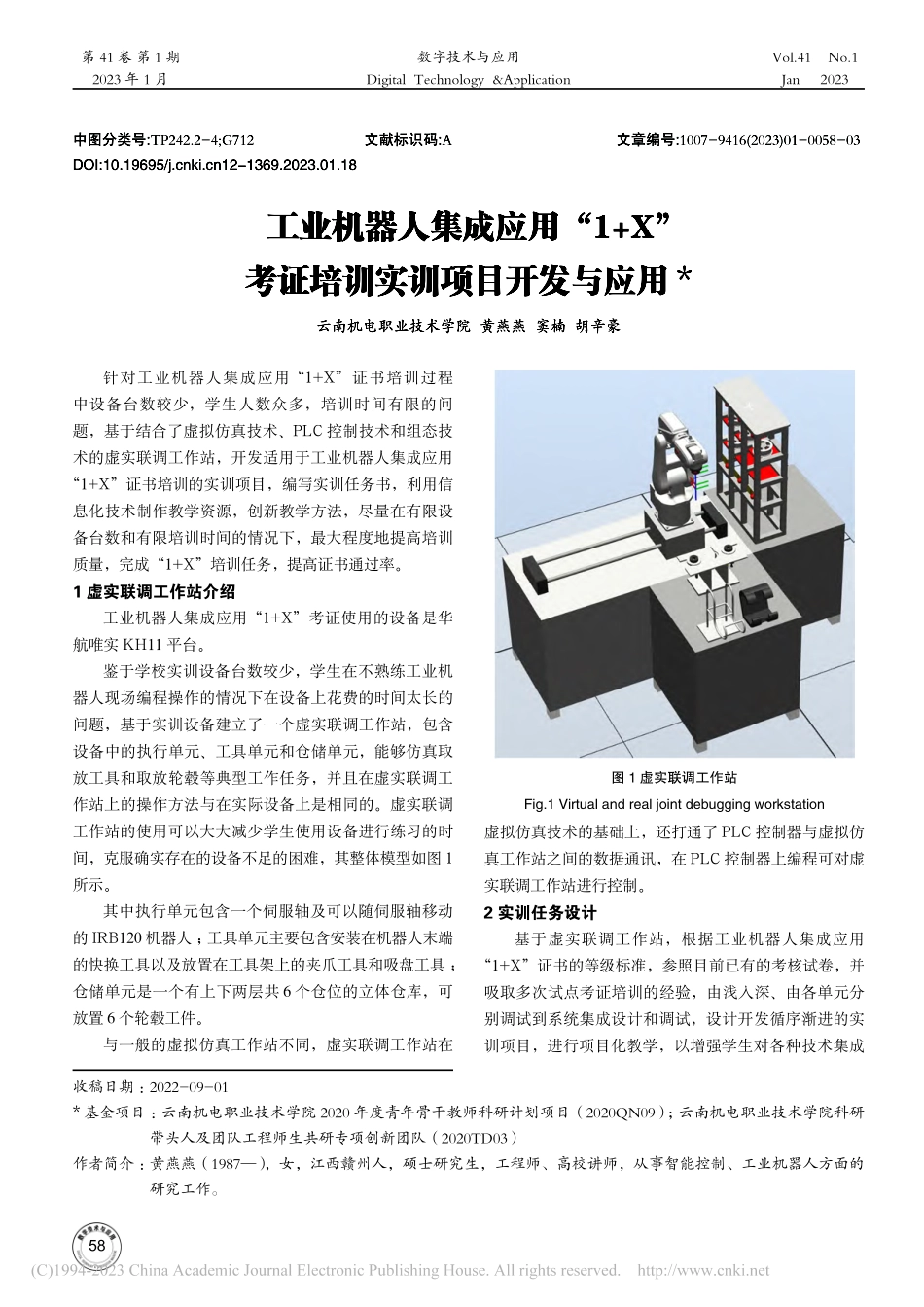
2023年1月Jan2023DigitalTechnology&Application第41卷第1期Vol.41No.1数字技术与应用58中图分类号:TP242.2-4;G712文献标识码:A文章编号:1007-9416(2023)01-0058-03DOI:10.19695/j.cnki.cn12-1369.2023.01.18工业机器人集成应用“1+X”考证培训实训项目开发与应用*云南机电职业技术学院黄燕燕窦楠胡辛豪针对工业机器人集成应用“1+X”证书培训过程中设备台数较少,学生人数众多,培训时间有限的问题,基于结合了虚拟仿真技术、PLC控制技术和组态技术的虚实联调工作站,开发适用于工业机器人集成应用“1+X”证书培训的实训项目,编写实训任务书,利用信息化技术制作教学资源,创新教学方法,尽量在有限设备台数和有限培训时间的情况下,最大程度地提高培训质量,完成“1+X”培训任务,提高证书通过率。1虚实联调工作站介绍工业机器人集成应用“1+X”考证使用的设备是华航唯实KH11平台。鉴于学校实训设备台数较少,学生在不熟练工业机器人现场编程操作的情况下在设备上花费的时间太长的问题,基于实训设备建立了一个虚实联调工作站,包含设备中的执行单元、工具单元和仓储单元,能够仿真取放工具和取放轮毂等典型工作任务,并且在虚实联调工作站上的操作方法与在实际设备上是相同的。虚实联调工作站的使用可以大大减少学生使用设备进行练习的时间,克服确实存在的设备不足的困难,其整体模型如图1所示。其中执行单元包含一个伺服轴及可以随伺服轴移动的IRB120机器人;工具单元主要包含安装在机器人末端的快换工具以及放置在工具架上的夹爪工具和吸盘工具;仓储单元是一个有上下两层共6个仓位的立体仓库,可放置6个轮毂工件。与一般的虚拟仿真工作站不同,虚实联调工作站在虚拟仿真技术的基础上,还打通了PLC控制器与虚拟仿真工作站之间的数据通讯,在PLC控制器上编程可对虚实联调工作站进行控制。2实训任务设计基于虚实联调工作站,根据工业机器人集成应用“1+X”证书的等级标准,参照目前已有的考核试卷,并吸取多次试点考证培训的经验,由浅入深、由各单元分别调试到系统集成设计和调试,设计开发循序渐进的实训项目,进行项目化教学,以增强学生对各种技术集成收稿日期:2022-09-01*基金项目:云南机电职业技术学院2020年度青年骨干教师科研计划项目(2020QN09);云南机电职业技术学院科研带头人及团队工程师生共研专项创新团队(2020TD03)作者简介:黄燕燕(1987—),女,江西赣州人,硕士研究生,工程师、高校讲师,从事智能控制、工业机器人...