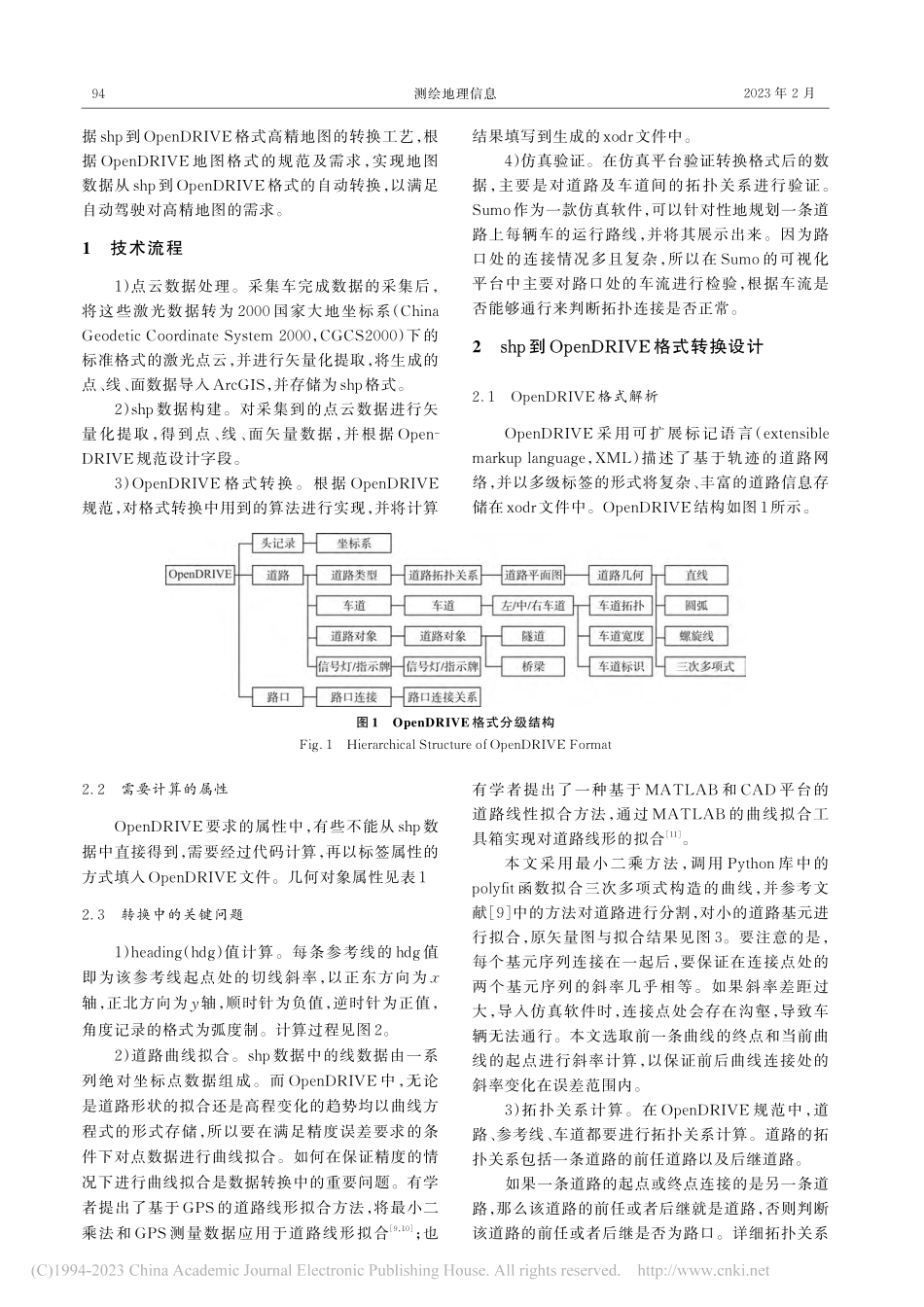
第48卷第1期2023年2月Vol.48No.1Feb.2023测绘地理信息JournalofGeomatics高精地图OpenDRIVE数据格式转换研究马英才1徐之俊2刘子雯1周剑3王昊1李连营11武汉大学资源与环境科学学院,湖北武汉,4300792湖北省测绘成果档案馆,湖北武汉,4300743武汉大学测绘遥感信息工程国家重点实验室,湖北武汉,430079OpenDRIVEDataFormatConversionofHigh-DefinitionMapMAYingcai1XUZhijun2LIUZiwen1ZHOUJian3WANGHao1LILianying11SchoolofResourcesandEnvironmentalSciences,WuhanUniversity,Wuhan430079,China2HubeiArchivesofSurveyingandMappingProduction,Wuhan430074,China3StateKeyLaboratoryofInformationEngineeringinSurveying,MappingandRemoteSensing,WuhanUniversity,Wuhan430079,China摘要:OpenDRIVE格式是高精地图数据的存储格式标准,但从原始数据采集到OpenDRIVE高精地图生成的过程涉及环节多、过程复杂,构建难度大。为此,设计了从shp数据到OpenDRIVE格式的高精地图构建方案,重点解决了轨迹坐标计算、曲线拟合、节点属性值计算、仿真验证等关键问题,并通过真实数据的转换验证了方案的可行性,有效提高了OpenDRIVE高精地图生成的自动化程度。关键词:高精地图;OpenDRIVE;格式转换;应用仿真中图分类号:P208文献标志码:AAbstract:OpenDRIVEformatisthestorageformatstandardofhigh-definitionmapdata.However,itisaverycomplexprocessfromoriginaldataacquisitiontothegenerationofOpenDRIVEhigh-definitionmap,whichinvolvesmanylinks.Anditisdifficulttobeconstructed.Therefore,wede⁃signahigh-definitionmapconstructionschemefromshpfor⁃mattoOpenDRIVEformat,focusingonsolvingthekeyprob⁃lemssuchastrajectorycoordinatecalculation,curvefitting,nodeattributevaluecalculation,simulationverificationandsoon.Thefeasibilityofthemethodisverifiedbyconvertingrealdata,andtheautomationdegreeofOpenDRIVEhigh-defini⁃tionmapgenerationiseffectivelyimprovedbytheproposedscheme.Keywords:high-definitionmap;OpenDRIVE;formatcon⁃version;applicationsimulation高精地图包含准确的几何坐标信息、道路形状以及每个车道的坡度、曲率、航向、高程等信息,可以提升静态地物语义识别的优势和感知算法的效率,提供环境的详细信息[1]。目前,高精地图采集方式主要有专业测绘模式和众包采集模式两种。在...