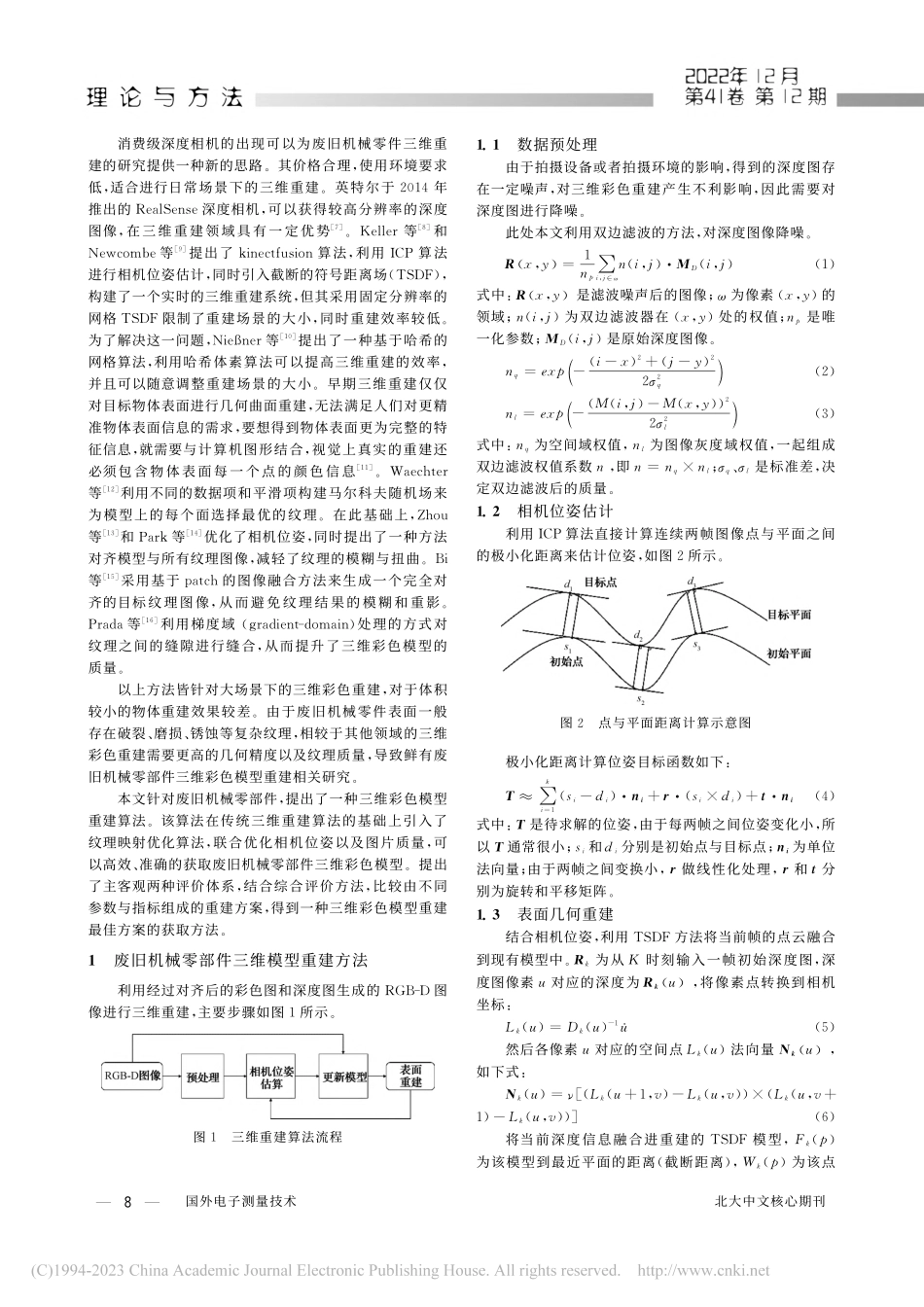
北大中文核心期刊国外电子测量技术DOI:10.19652/j.cnki.femt.2204338废旧机械零部件三维彩色模型重建方法*张泽琳1,2许辉1,2王蕾1,2夏绪辉1,2(1.武汉科技大学冶金装备及其控制教育部重点实验室武汉430081;2.武汉科技大学机械传动与制造工程湖北省重点实验室武汉430081)摘要:为了提高废旧机械零部件再制造效率,并对废旧机械零部件的失效状态进行实时监测,提出了一种低成本、高效率的废旧机械零部件三维彩色模型重建方法。采用运动的深度相机获取深度数据流,经过数据预处理、位姿估计以及表面几何重建后,利用纹理映射算法对相机姿态以及图片质量进行联合优化,构建废旧机械零部件三维彩色模型,同时提出主客观两种评价体系以及综合评价参数方案。实验表明,重建方法误差较小、细节清晰,并可获得最佳参数设置方案,对于实际生产过程具有指导意义。关键词:废旧机械零部件;三维彩色重建;纹理映射;综合评价中图分类号:TP391.7文献标识码:A国家标准学科分类代码:520.6043DcolormodelreconstructionmethodforscrapmechanicalpartsZhangZelin1,2XuHui1,2WangLei1,2XiaXuhui1,2(1.KeyLaboratoryofMetallurgicalEquipmentandControlTechnology,WuhanUniversityofScienceandTechnology,Wuhan430081,China;2.KeyLaboratoryofMechanicalTransmissionandManufacturingEngineering,WuhanUniversityofScienceandTechnology,Wuhan430081,China)Abstract:Inordertoimprovetheremanufacturingefficiencyofwastemechanicalpartsandcomponentsandmonitorthefailurestatusofwastemechanicalpartsinrealtime,weproposealow-costandhigh-efficiencythree-dimensionalcolormodelrecon...