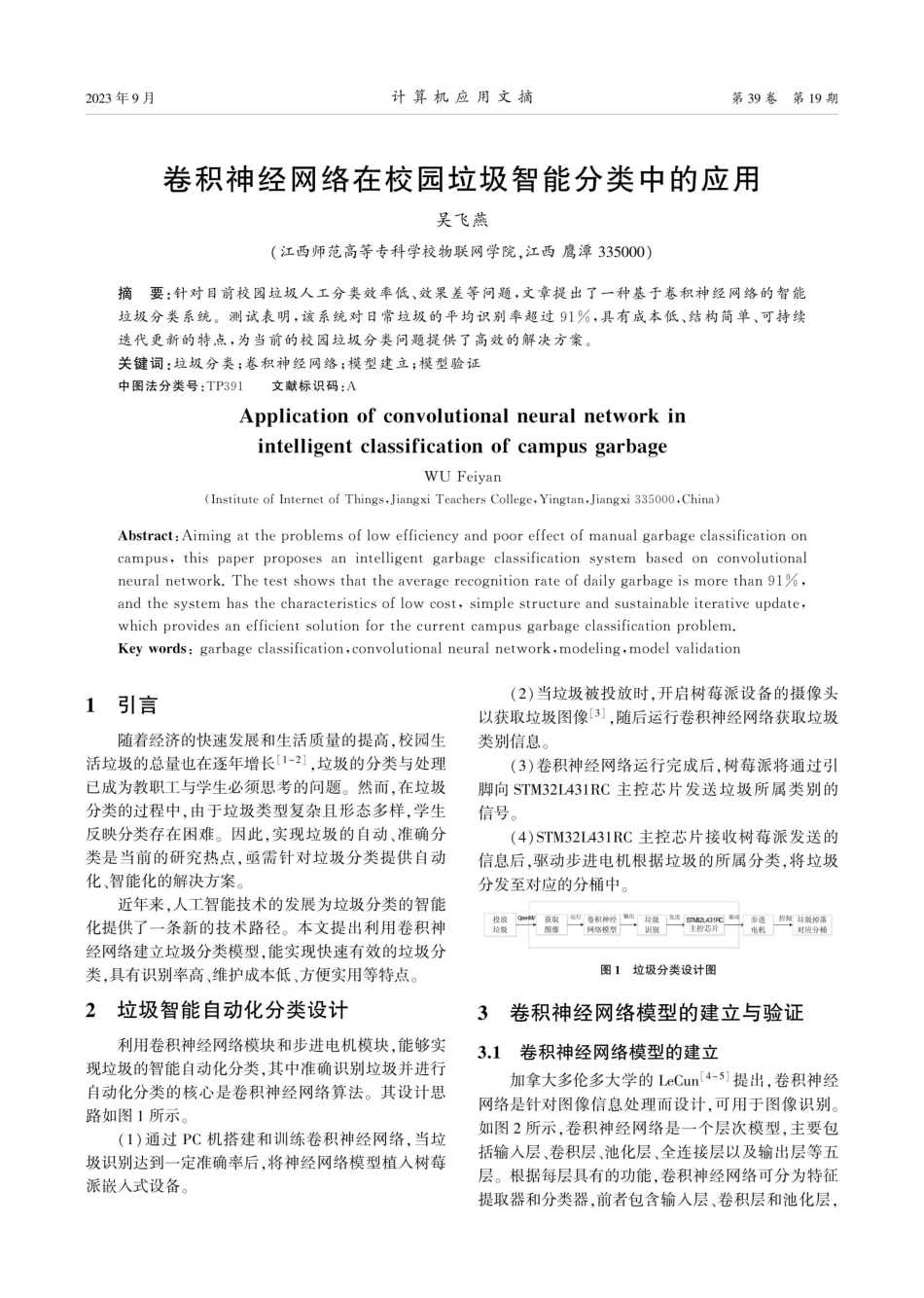
2023年9月计算机应用文摘第39卷第19期卷积神经网络在校园垃圾智能分类中的应用吴飞燕(江西师范高等专科学校物联网学院,江西鹰潭335000)摘要:针对目前校园垃圾人工分类效率低、效果差等问题,文章提出了一种基于卷积神经网络的智能垃圾分类系统。测试表明,该系统对日常垃圾的平均识别率超过91%,具有成本低、结构简单、可持续迭代更新的特点,为当前的校园垃圾分类问题提供了高效的解决方案。关键词:垃圾分类;卷积神经网络;模型建立;模型验证WUFeiyan中图法分类号:TP391(InstituteofInternetofThings,JiangxiTeachersCollege,Yingtan,Jiangxi335000,China)Abstract:Aimingattheproblemsoflowefficiencyandpooreffectofmanualgarbageclassificationoncampus,thispaperproposesanintelligentgarbageclassificationsystembasedonconvolutionalneuralnetwork.Thetestshowsthattheaveragerecognitionrateofdailygarbageismorethan91%,andthesystemhasthecharacteristicsoflowcost,simplestructureandsustainableiterativeupdate,whichprovidesanefficientsolutionforthecurrentcampusgarbageclassificationproblem.Keywords:garbageclassification,convolutionalneuralnetwork,modeling,modelvalidation1引言随着经济的快速发展和生活质量的提高,校园生活垃圾的总量也在逐年增长[1~2],垃圾的分类与处理已成为教职工与学生必须思考的问题。然而,在垃圾分类的过程中,由于垃圾类型复杂且形态多样,学生反映分类存在困难。因此,实现垃圾的自动、准确分类是当前的研究热点,呕需针对垃圾分类提供自动化、智能化的解决方案。近年来,人工智能技术的发展为垃圾分类的智能化提供了一条新的技术路径。本文提出利用卷积神经网络建立垃圾分类模型,能实现快速有效的垃圾分类,具有识别率高、维护成本低、方便实用等特点。2垃圾智能自动化分类设计利用卷积神经网络模块和步进电机模块,能够实现垃圾的智能自动化分类,其中准确识别垃圾并进行自动化分类的核心是卷积神经网络算法。其设计思路如图1所示。(1)通过PC机搭建和训练卷积神经网络,当垃圾识别达到一定准确率后,将神经网络模型植入树莓派嵌人式设备。文献标识码:AApplicationofconvolutionalneuralnetworkinintelligentclassificationofcampusgarbage垃圾发送STMB2L431FC垃圾图像3卷积神经网络模型的建立与验证3.1卷积神经网络模型的建立加拿大多伦多大学的LeCun[4~5】提出,卷积神经网络是针对图...