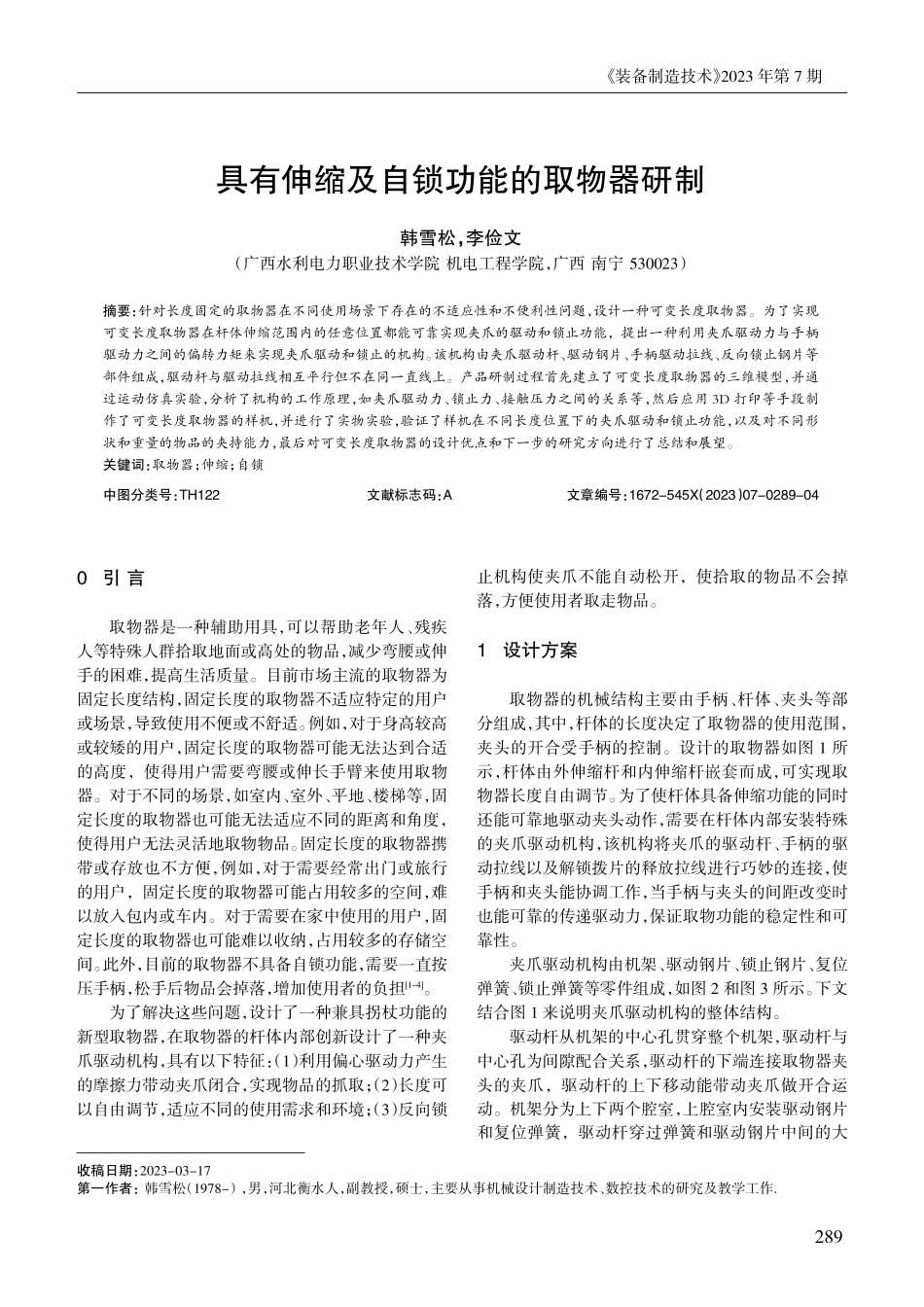
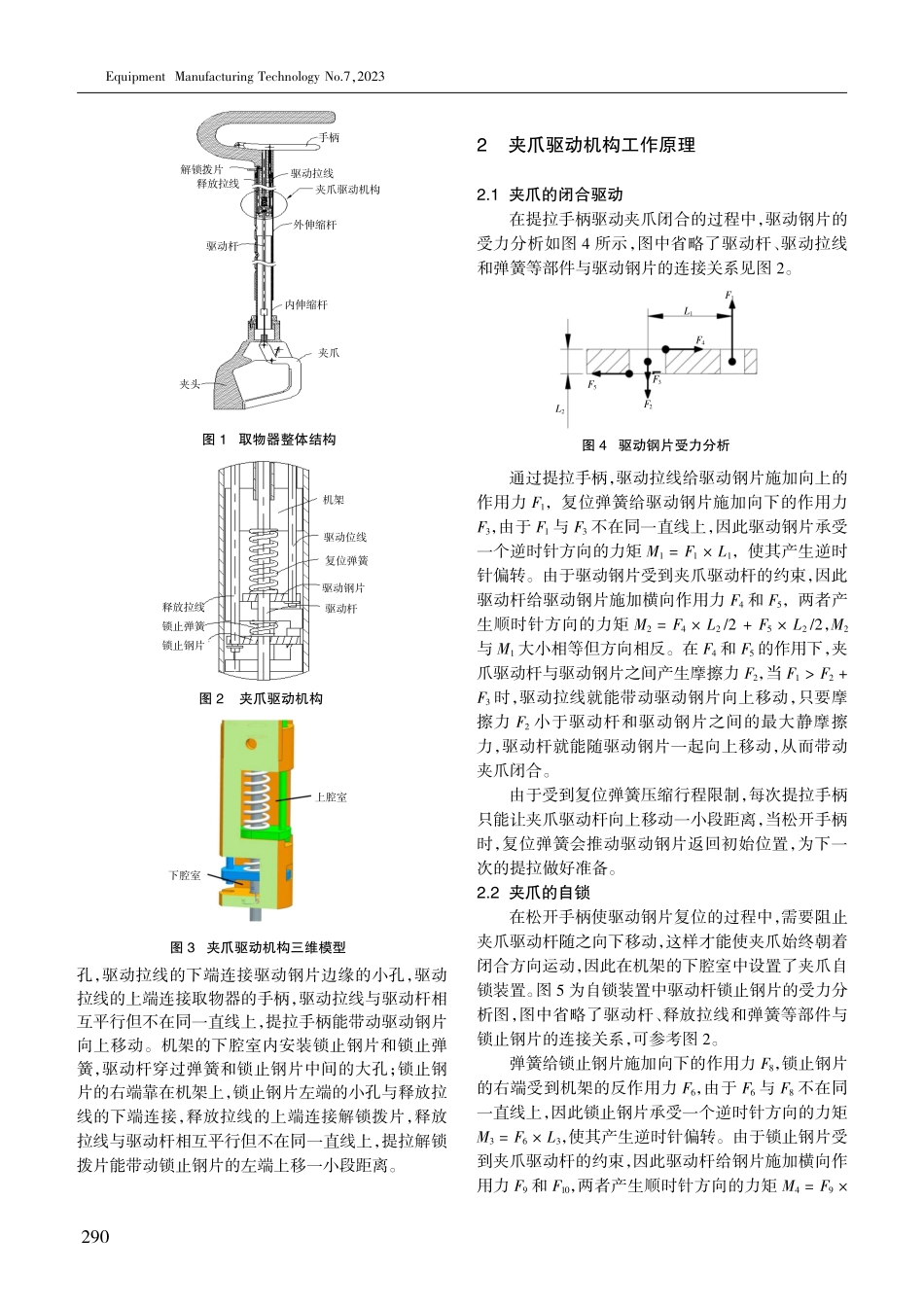
《装备制造技术》2023年第7期0引言取物器是一种辅助用具,可以帮助老年人、残疾人等特殊人群拾取地面或高处的物品,减少弯腰或伸手的困难,提高生活质量。目前市场主流的取物器为固定长度结构,固定长度的取物器不适应特定的用户或场景,导致使用不便或不舒适。例如,对于身高较高或较矮的用户,固定长度的取物器可能无法达到合适的高度,使得用户需要弯腰或伸长手臂来使用取物器。对于不同的场景,如室内、室外、平地、楼梯等,固定长度的取物器也可能无法适应不同的距离和角度,使得用户无法灵活地取物物品。固定长度的取物器携带或存放也不方便,例如,对于需要经常出门或旅行的用户,固定长度的取物器可能占用较多的空间,难以放入包内或车内。对于需要在家中使用的用户,固定长度的取物器也可能难以收纳,占用较多的存储空间。此外,目前的取物器不具备自锁功能,需要一直按压手柄,松手后物品会掉落,增加使用者的负担[1-4]。为了解决这些问题,设计了一种兼具拐杖功能的新型取物器,在取物器的杆体内部创新设计了一种夹爪驱动机构,具有以下特征:(1)利用偏心驱动力产生的摩擦力带动夹爪闭合,实现物品的抓取;(2)长度可以自由调节,适应不同的使用需求和环境;(3)反向锁止机构使夹爪不能自动松开,使拾取的物品不会掉落,方便使用者取走物品。1设计方案取物器的机械结构主要由手柄、杆体、夹头等部分组成,其中,杆体的长度决定了取物器的使用范围,夹头的开合受手柄的控制。设计的取物器如图1所示,杆体由外伸缩杆和内伸缩杆嵌套而成,可实现取物器长度自由调节。为了使杆体具备伸缩功能的同时还能可靠地驱动夹头动作,需要在杆体内部安装特殊的夹爪驱动机构,该机构将夹爪的驱动杆、手柄的驱动拉线以及解锁拨片的释放拉线进行巧妙的连接,使手柄和夹头能协调工作,当手柄与夹头的间距改变时也能可靠的传递驱动力,保证取物功能的稳定性和可靠性。夹爪驱动机构由机架、驱动钢片、锁止钢片、复位弹簧、锁止弹簧等零件组成,如图2和图3所示。下文结合图1来说明夹爪驱动机构的整体结构。驱动杆从机架的中心孔贯穿整个机架,驱动杆与中心孔为间隙配合关系,驱动杆的下端连接取物器夹头的夹爪,驱动杆的上下移动能带动夹爪做开合运动。机架分为上下两个腔室,上腔室内安装驱动钢片和复位弹簧,驱动杆穿过弹簧和驱动钢片中间的大具有伸缩及自锁功能的取物器研制韩雪松,李俭文(广西水利电力职业技术学院机电工程学院,广西南宁530023)摘...