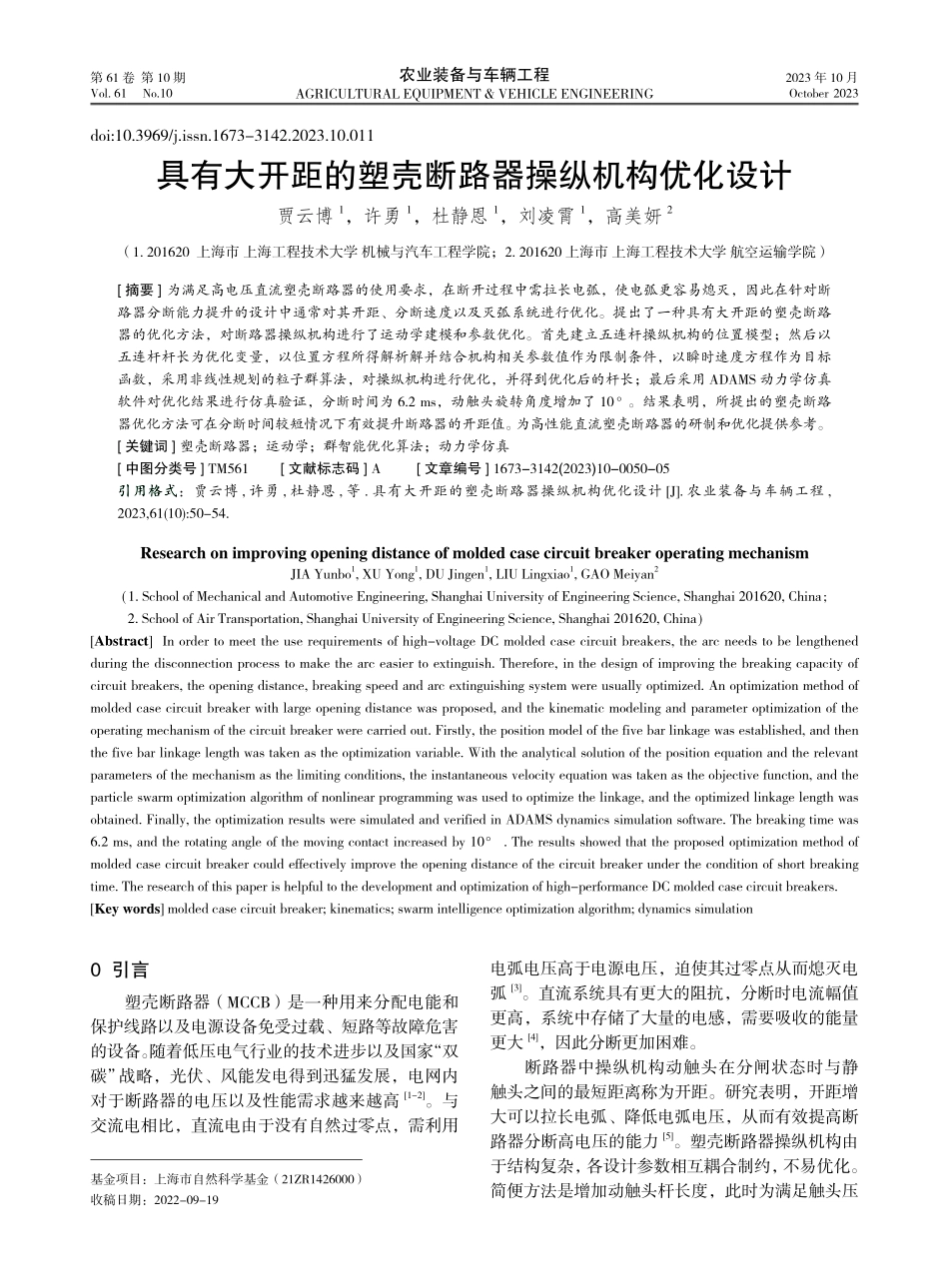
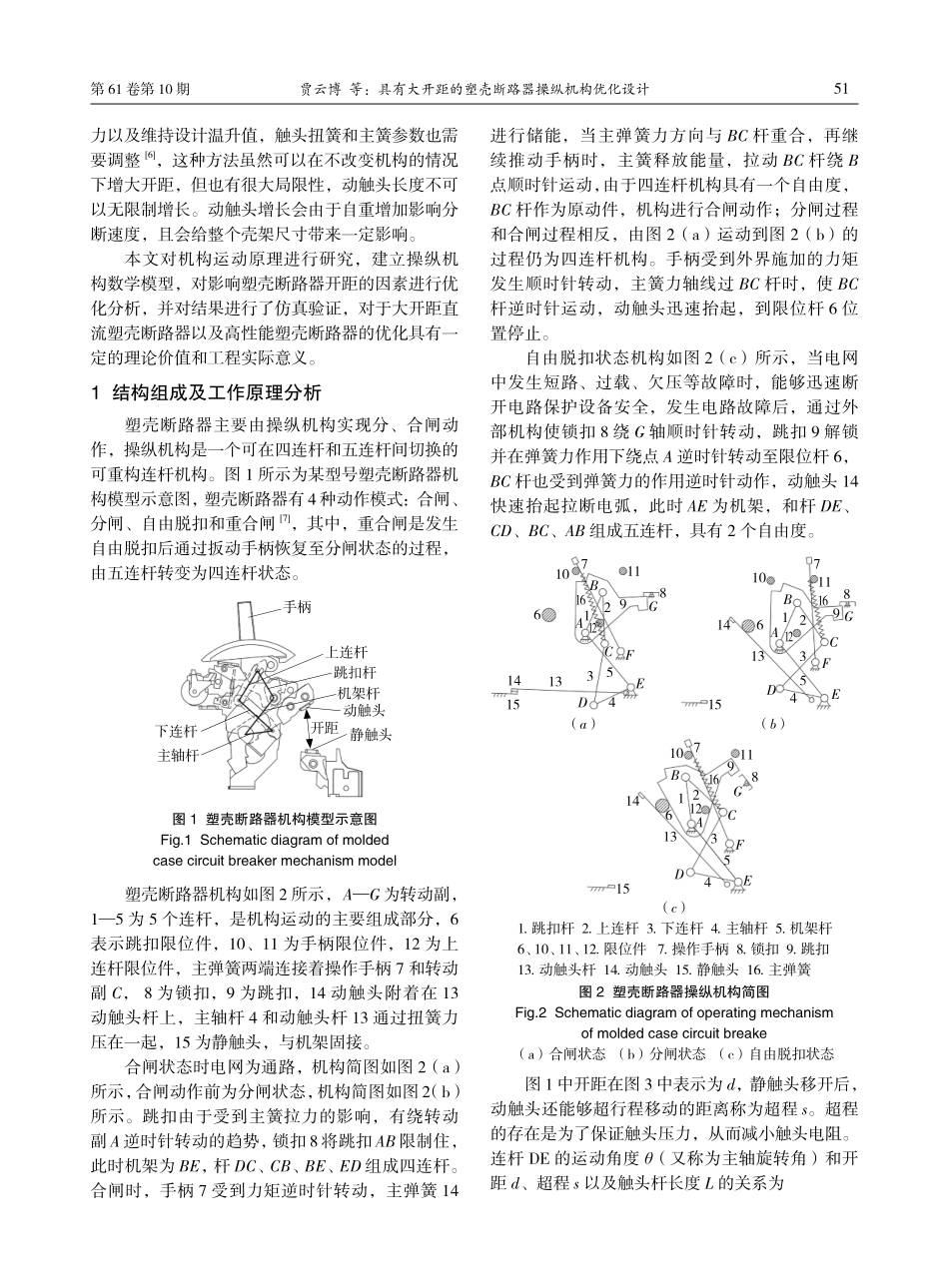
第61卷第10期Vol.61No.102023年10月October2023农业装备与车辆工程AGRICULTURALEQUIPMENT&VEHICLEENGINEERINGdoi:10.3969/j.issn.1673-3142.2023.10.011具有大开距的塑壳断路器操纵机构优化设计贾云博1,许勇1,杜静恩1,刘凌霄1,高美妍2(1.201620上海市上海工程技术大学机械与汽车工程学院;2.201620上海市上海工程技术大学航空运输学院)[摘要]为满足高电压直流塑壳断路器的使用要求,在断开过程中需拉长电弧,使电弧更容易熄灭,因此在针对断路器分断能力提升的设计中通常对其开距、分断速度以及灭弧系统进行优化。提出了一种具有大开距的塑壳断路器的优化方法,对断路器操纵机构进行了运动学建模和参数优化。首先建立五连杆操纵机构的位置模型;然后以五连杆杆长为优化变量,以位置方程所得解析解并结合机构相关参数值作为限制条件,以瞬时速度方程作为目标函数,采用非线性规划的粒子群算法,对操纵机构进行优化,并得到优化后的杆长;最后采用ADAMS动力学仿真软件对优化结果进行仿真验证,分断时间为6.2ms,动触头旋转角度增加了10°。结果表明,所提出的塑壳断路器优化方法可在分断时间较短情况下有效提升断路器的开距值。为高性能直流塑壳断路器的研制和优化提供参考。[关键词]塑壳断路器;运动学;群智能优化算法;动力学仿真[中图分类号]TM561[文献标志码]A[文章编号]1673-3142(2023)10-0050-05引用格式:贾云博,许勇,杜静恩,等.具有大开距的塑壳断路器操纵机构优化设计[J].农业装备与车辆工程,2023,61(10):50-54.ResearchonimprovingopeningdistanceofmoldedcasecircuitbreakeroperatingmechanismJIAYunbo1,XUYong1,DUJingen1,LIULingxiao1,GAOMeiyan2(1.SchoolofMechanicalandAutomotiveEngineering,ShanghaiUniversityofEngineeringScience,Shanghai201620,China;2.SchoolofAirTransportation,ShanghaiUniversityofEngineeringScience,Shanghai201620,China)[Abstract]Inordertomeettheuserequirementsofhigh-voltageDCmoldedcasecircuitbreakers,thearcneedstobelengthenedduringthedisconnectionprocesstomakethearceasiertoextinguish.Therefore,inthedesignofimprovingthebreakingcapacityofcircuitbreakers,theopeningdistance,breakingspeedandarcextinguishingsystemwereusuallyoptimized.Anoptimizationmethodofmoldedcasecircuitbreakerwithlargeopeningdistancewasproposed,andthekinematicmodelingandparameteroptimizat...