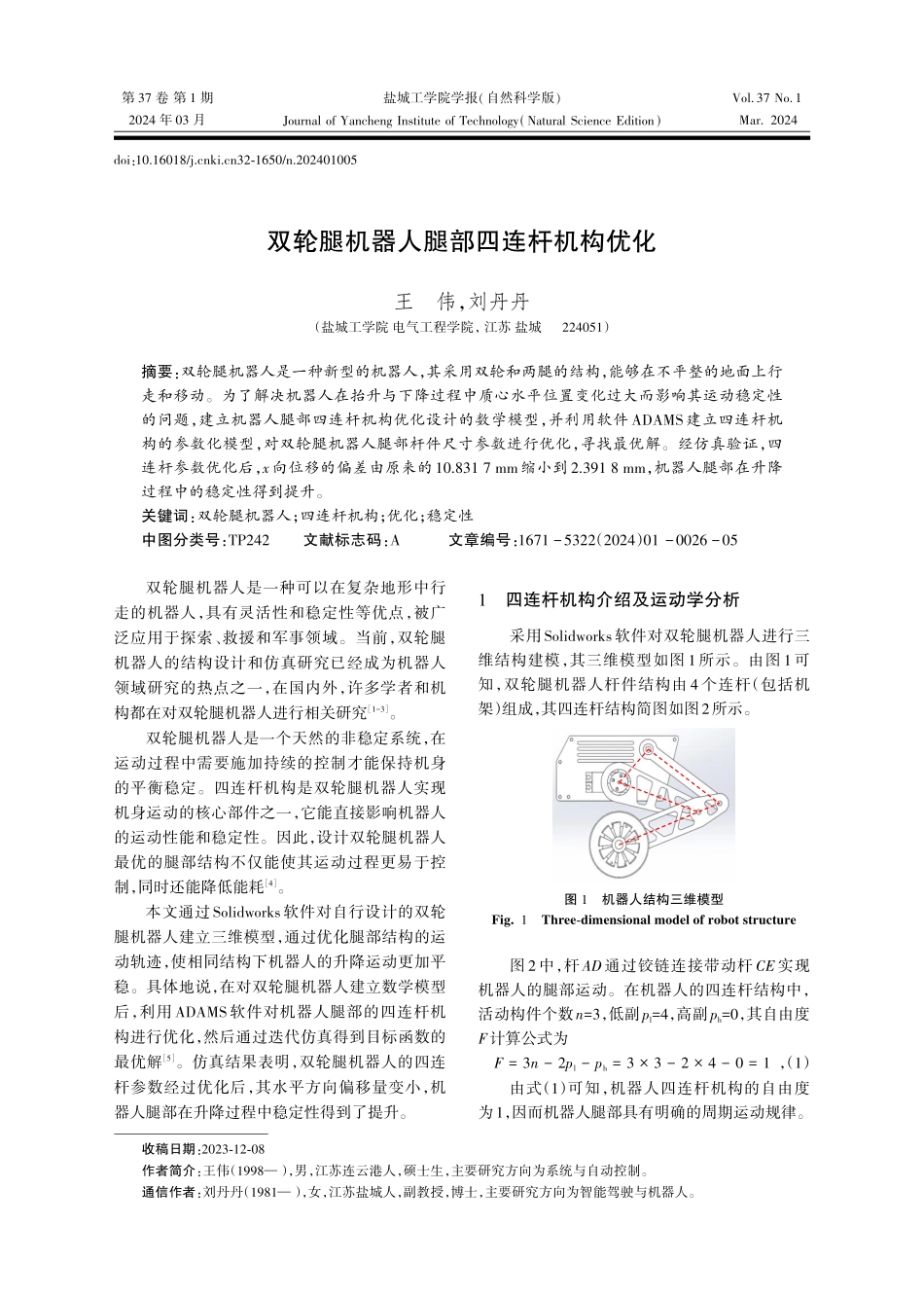
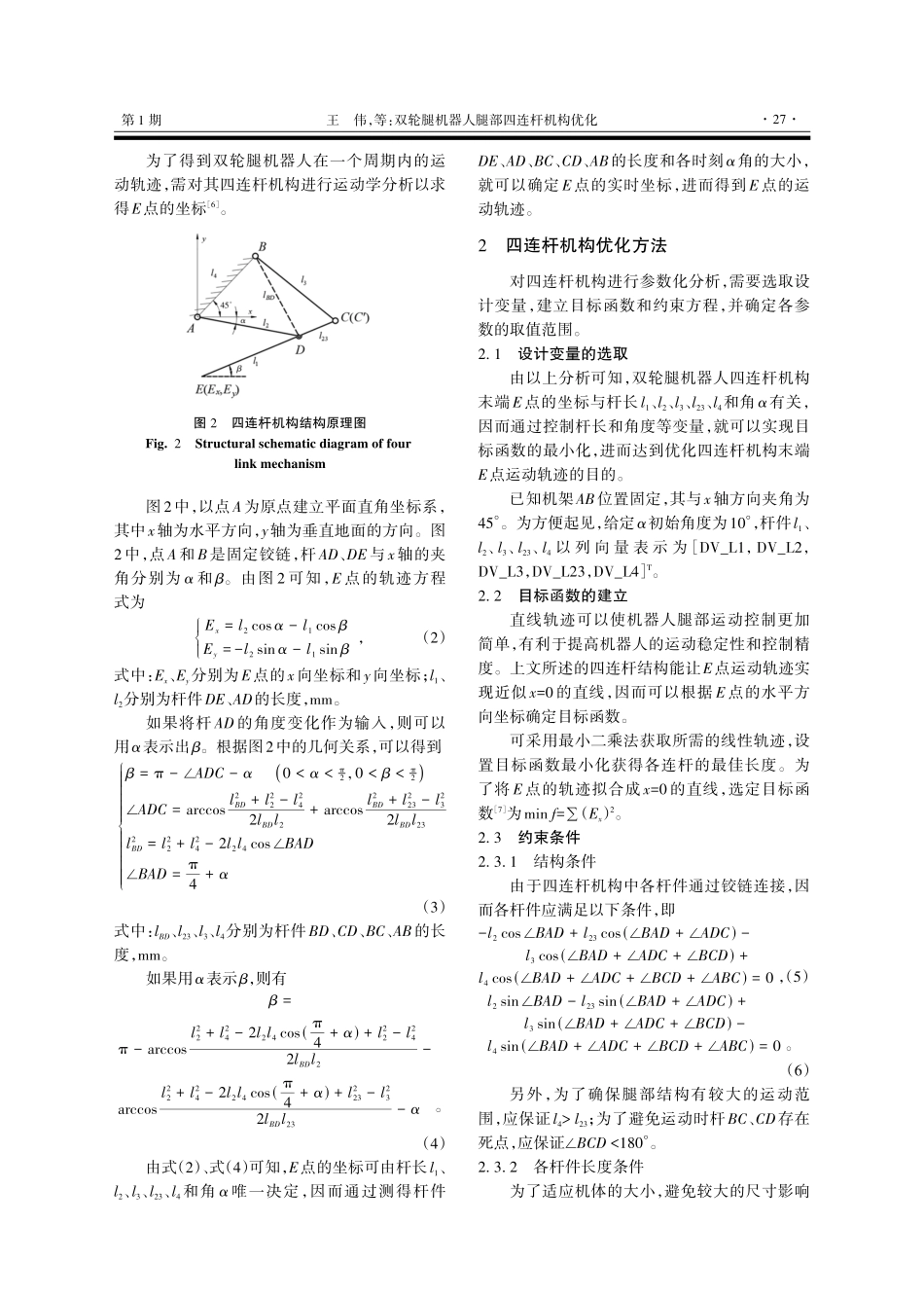
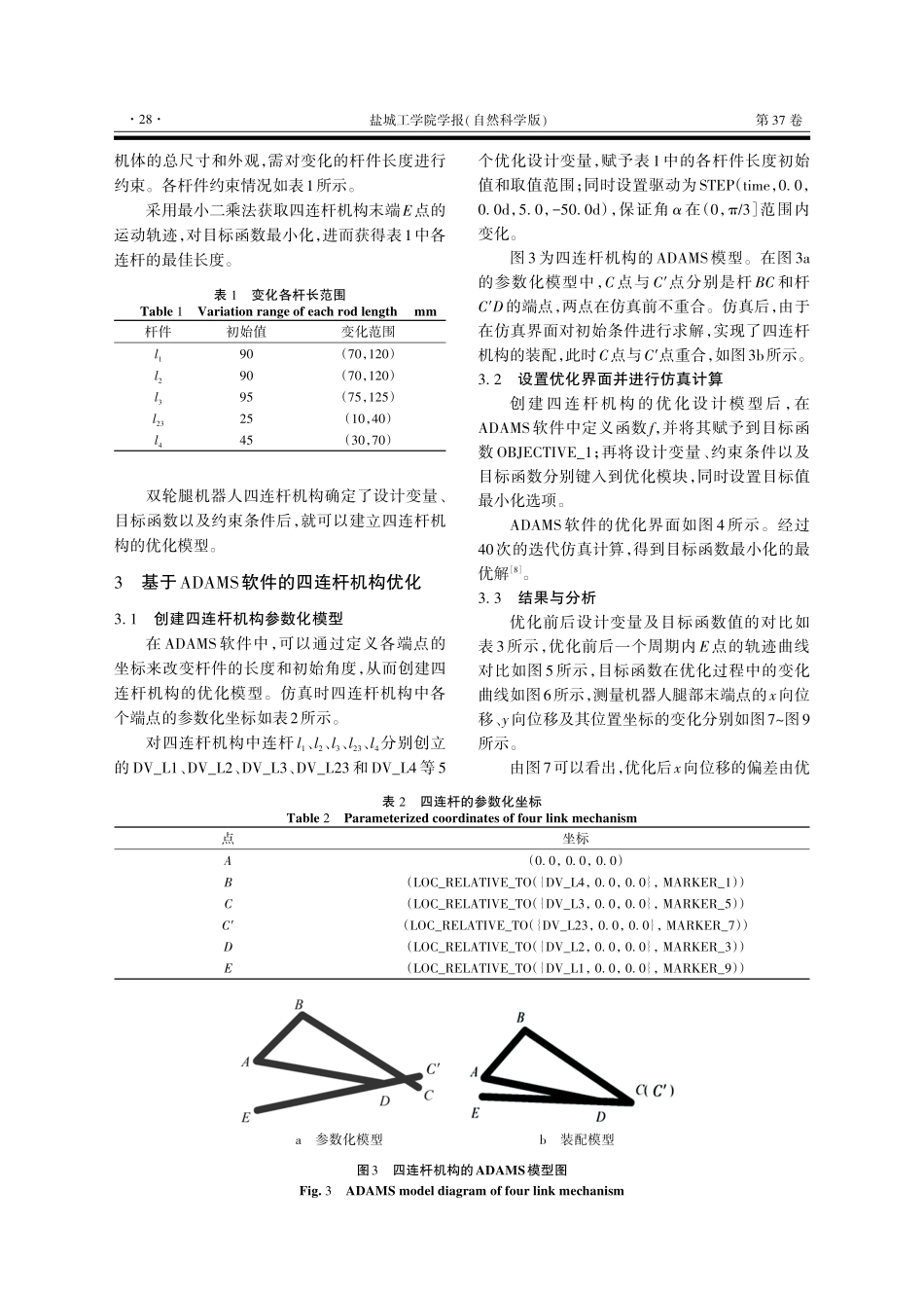
第37卷第1期2024年03月Vol.37No.1Mar.2024盐城工学院学报(自然科学版)JournalofYanchengInstituteofTechnology(NaturalScienceEdition)双轮腿机器人腿部四连杆机构优化王伟,刘丹丹(盐城工学院电气工程学院,江苏盐城224051)摘要:双轮腿机器人是一种新型的机器人,其采用双轮和两腿的结构,能够在不平整的地面上行走和移动。为了解决机器人在抬升与下降过程中质心水平位置变化过大而影响其运动稳定性的问题,建立机器人腿部四连杆机构优化设计的数学模型,并利用软件ADAMS建立四连杆机构的参数化模型,对双轮腿机器人腿部杆件尺寸参数进行优化,寻找最优解。经仿真验证,四连杆参数优化后,x向位移的偏差由原来的10.8317mm缩小到2.3918mm,机器人腿部在升降过程中的稳定性得到提升。关键词:双轮腿机器人;四连杆机构;优化;稳定性中图分类号:TP242文献标志码:A文章编号:1671-5322(2024)01-0026-05双轮腿机器人是一种可以在复杂地形中行走的机器人,具有灵活性和稳定性等优点,被广泛应用于探索、救援和军事领域。当前,双轮腿机器人的结构设计和仿真研究已经成为机器人领域研究的热点之一,在国内外,许多学者和机构都在对双轮腿机器人进行相关研究[1-3]。双轮腿机器人是一个天然的非稳定系统,在运动过程中需要施加持续的控制才能保持机身的平衡稳定。四连杆机构是双轮腿机器人实现机身运动的核心部件之一,它能直接影响机器人的运动性能和稳定性。因此,设计双轮腿机器人最优的腿部结构不仅能使其运动过程更易于控制,同时还能降低能耗[4]。本文通过Solidworks软件对自行设计的双轮腿机器人建立三维模型,通过优化腿部结构的运动轨迹,使相同结构下机器人的升降运动更加平稳。具体地说,在对双轮腿机器人建立数学模型后,利用ADAMS软件对机器人腿部的四连杆机构进行优化,然后通过迭代仿真得到目标函数的最优解[5]。仿真结果表明,双轮腿机器人的四连杆参数经过优化后,其水平方向偏移量变小,机器人腿部在升降过程中稳定性得到了提升。1四连杆机构介绍及运动学分析采用Solidworks软件对双轮腿机器人进行三维结构建模,其三维模型如图1所示。由图1可知,双轮腿机器人杆件结构由4个连杆(包括机架)组成,其四连杆结构简图如图2所示。图2中,杆AD通过铰链连接带动杆CE实现机器人的腿部运动。在机器人的四连杆结构中,活动构件个数n=3,低副pl=4,高副ph=0,其自由度F计算公式为F=3n-2pl-ph=3×3-2×4-0=1,(1)由式(1)可知,...