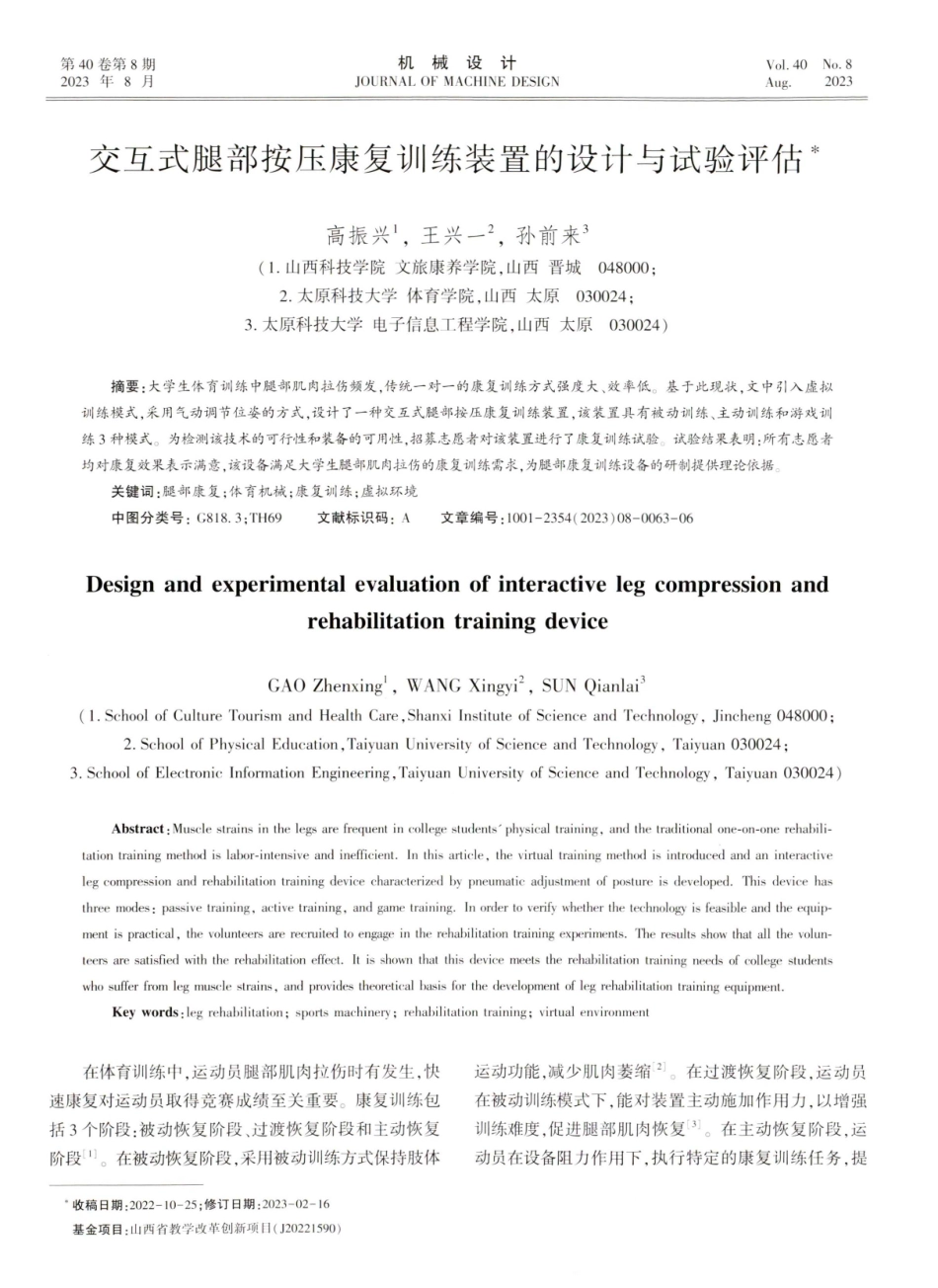
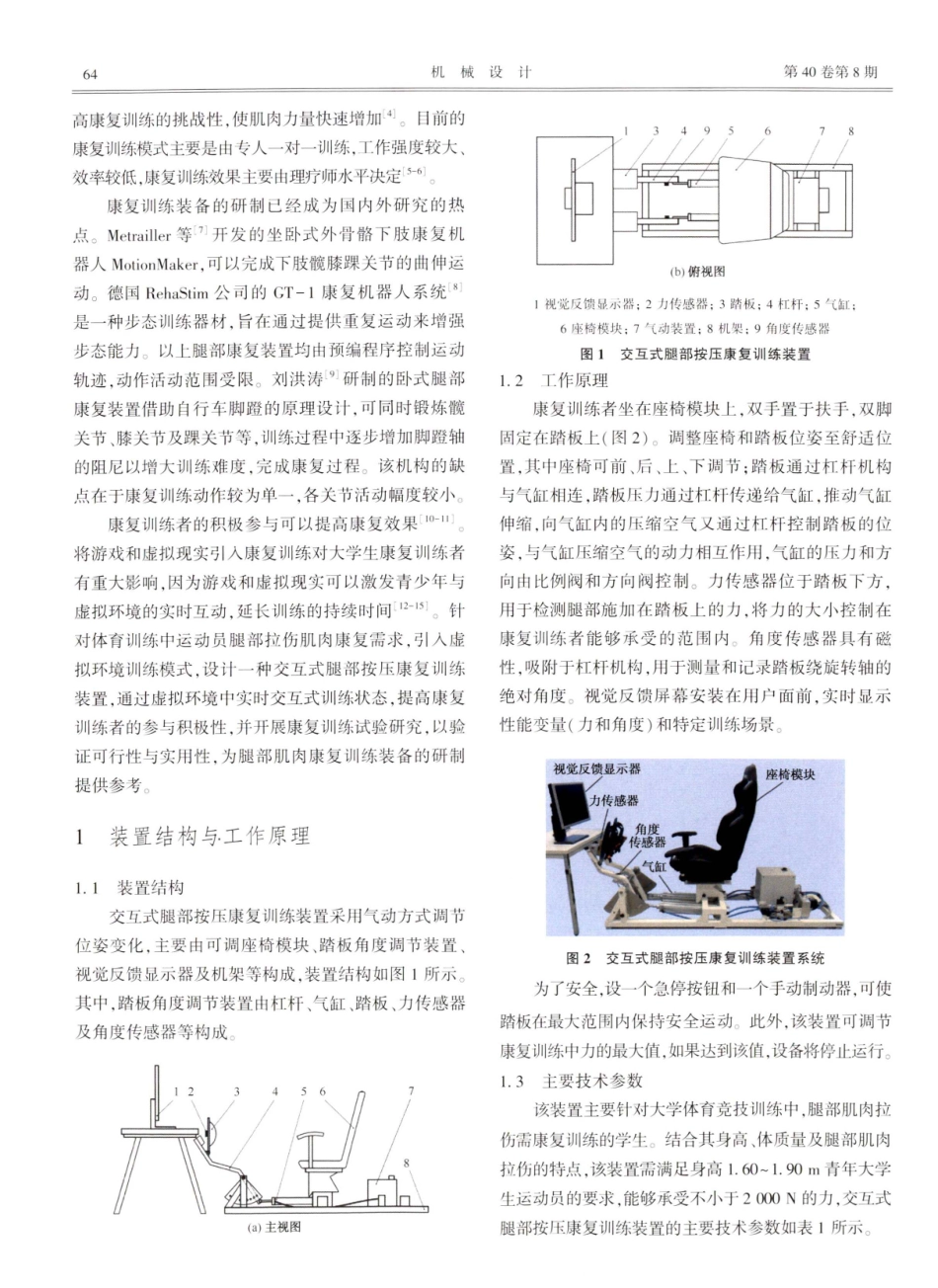
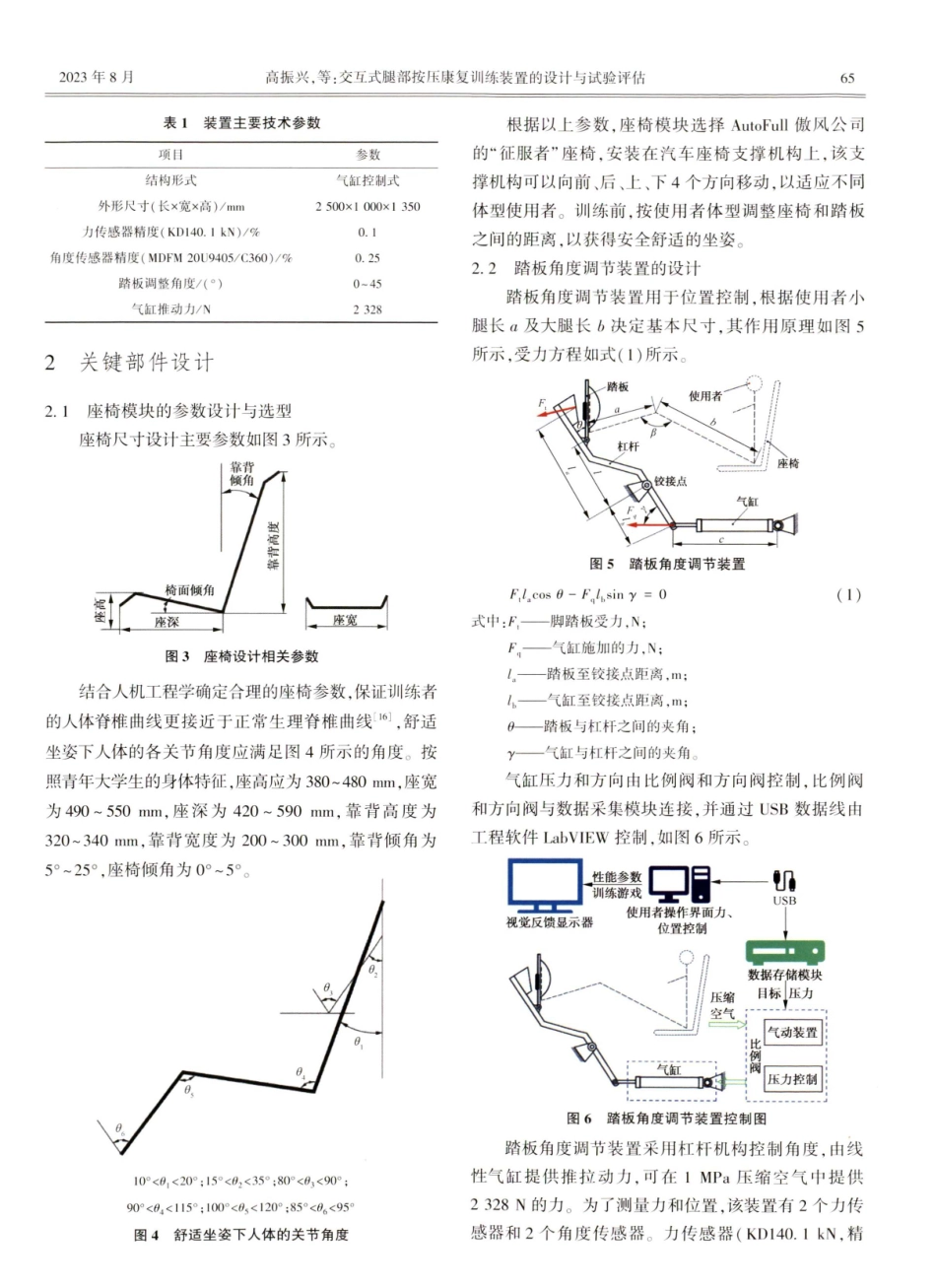
Aug.2023JOURNALOFMACHINEDESIGN2023年8月Vol.40No.8第40卷第8期机计设械交互式腿部按压康复训练装置的设计与试验评估高振兴,王兴一²,孙前来3(1.山西科技学院文旅康养学院,山西晋城048000;2.太原科技大学体育学院,山西太原030024;3.太原科技大学电子信息工程学院,山西太原030024)摘要:大学生体育训练中腿部肌肉拉伤频发,传统一对一的康复训练方式强度大、效率低。基于此现状,文中引入虚拟训练模式,采用气动调节位姿的方式,设计了一种交互式腿部按压康复训练装置,该装置具有被动训练、主动训练和游戏训练3种模式。为检测该技术的可行性和装备的可用性,招募志愿者对该装置进行了康复训练试验。试验结果表明:所有志愿者均对康复效果表示满意,该设备满足大学生腿部肌肉拉伤的康复训练需求,为腿部康复训练设备的研制提供理论依据。关键词:腿部康复;体育机械;康复训练;虚拟环境中图分类号:G818.3;TH69文献标识码:A文章编号:1001-2354(2023)08-0063-06DesignandexperimentalevaluationofinteractivelegcompressionandrehabilitationtrainingdeviceGAOZhenxing’,WANGXingyi?,SUNQianlai3(1.SchoolofCultureTourismandHealthCare,ShanxiInstituteofScienceandTechnology,Jincheng048000;2.SchoolofPhysicalEducation,TaiyuanUniversityofScienceandTechnology,Taiyuan030024;3.SchoolofElectronicInformationEngineering,TaiyuanUniversityofScienceandTechnology,Taiyuan030024)Abstract:Musclestrainsinthelegsarefrequentincollegestudents'physicaltraining,andthetraditionalone-on-onerehabili-tationtrainingmethodislabor-intensiveandinefficient.Inthisarticle,thevirtualtrainingmethodisintroducedandaninteractivelegcompressionandrehabilitationtrainingdevicecharacterizedbypneumaticadjustmentofpostureisdeveloped.Thisdevicehasthreemodes:passivetraining,activetraining,andgametraining.Inordertoverifywhetherthetechnologyisfeasibleandtheequip-mentispractical,thevolunteersarerecruitedtoengageintherehabilitationtrainingexperiments.Theresultsshowthatallthevolun-teersaresatisfiedwiththerehabilitationeffect.Itisshownthatthisdevicemeetstherehabilitationtrainingneedsofcollegestudentswhosufferfromlegmusclestrains,andprovidestheoreticalbasisforthedevelopmentoflegrehabilitationtr...