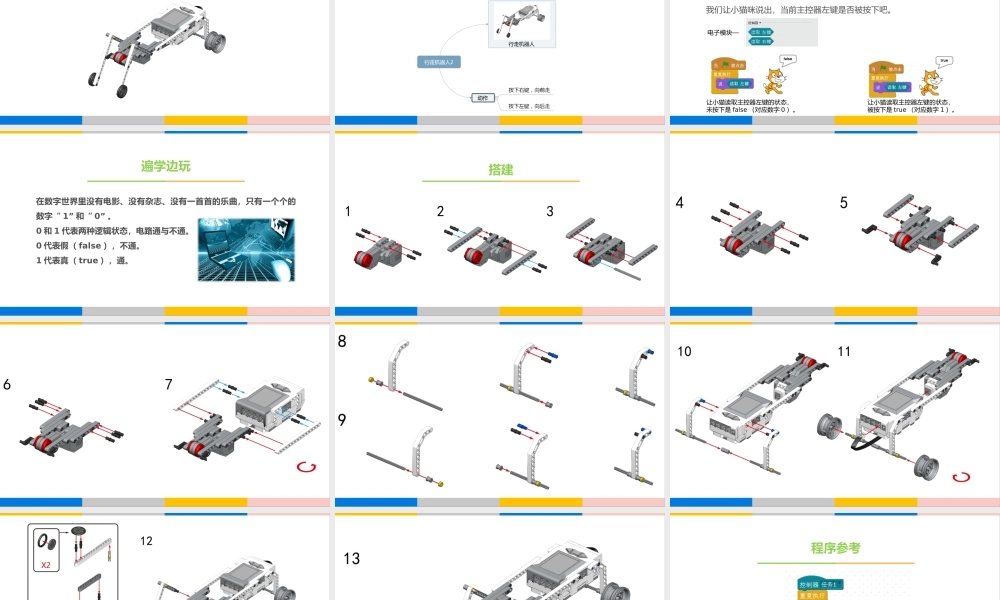
智慧未来未来智慧开智EV5开智EV5是自主研发在一款科教产品,科技件完美兼容乐高的产品。同时实现编程使用了国际化的最为认同的编程软件,scratch编程。由麻省理工学院(MIT)设计开发的一款面向少年的简易编程工具。开智EV5主控器(Rcu)标配4种传感器标配:超声波传感器(复眼)触碰传感器(2个)颜色传感器(1个)陀螺仪传感器(1个)马达标配:大型伺服马达(2个)中型伺服马达(1个)ev5套装配件行走机器人课程案例(120分钟)课程解读本节课学生将搭建一个行走机器人,了解连杆结构,通过编程使马达实现连杆步行运动,实现机器人前进,后退。情景导入同学们,你们看,这个机器人是不是很滑稽呢,你们觉得它走起来像什么动物呢?(举手发言)这个行走机器人,用了一个特殊的结构,你们看它的脚,这个是什么结构呢?(讨论,获得答案:连杆结构)今天我们也来做一个行走机器人吧。结构介绍连杆结构连杆机构,又称低副机构,是机械的组成部分中的一类,指由若干(两个以上)有确定相对运动的构件用低副(转动副或移动副)联接组成的机构。作品演示思维导图编学边玩我们让小猫咪说出,当前主控器左键是否被按下吧。电子模块—让小猫读取主控器左键的状态,未按下是false(对应数字0)。让小猫读取主控器左键的状态,被按下是true(对应数字1)。遍学边玩在数字世界里没有电影、没有杂志、没有一首首的乐曲,只有一个个的数字“1”和“0”。0和1代表两种逻辑状态,电路通与不通。0代表假(false),不通。1代表真(true),通。搭建程序参考延续1.简单回顾本节课的学习重点;2.引导学生课后思考:a.我们想想,如何可以让行走机器人速度更快。b.我们试试,改装我们的行走机器人,让它边的更酷吧。评价1、课堂:找典型的学生,让他发表学习演讲,内容包括以下几个方面:今天这节课使用了哪些主要零件,制作了哪些模型?在制作过程中遇到了哪些困难,我是怎么解决的?我制作的模型,有哪些部分做的很特别,与众不同?哪些部分做的不够好?我使用了哪些指令编写程序?实现了什么样的功能?我最大的收获是什么?2、整理零件学生下课前,要求整理收纳好零件评价3、评价卡对于搭建比较好的同学奖励一张巧手卡对于编程掌握的比较好的学生奖励一张智慧卡4、奖励一个学期下来,累计到最多卡的学生,给与适当的奖品奖励。ThankYou凯裕科技把最好的教育给孩子们