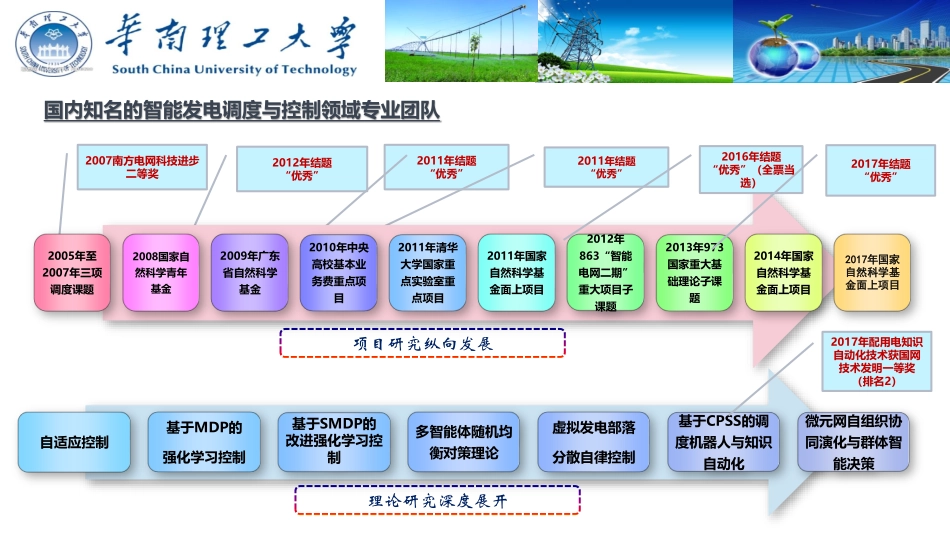
基于信息-物理-社会融合系统的智慧能源调度机器人理论与实践报告人:余涛教授博士生导师华南理工大学电力学院2018年12月•研究工作经历:2011/3-至今,华南理工大学,“兴华人才”学科团队(配电网智能化与节能技术)负责人2014/5-2015/3,澳大利亚悉尼大学,电气信息学院,访问学者2011/9-至今,华南理工大学,电力学院,教授/博士生导师(破格)2010/9-2013/7,香港理工大学电机工程学系,博士生副导师2006/12-2011/8,华南理工大学,电力学院,副教授/硕士生导师2005/4-2006/4,香港理工大学电机工程学系,副研究员2003/9-2006/11,华南理工大学电力学院,讲师•教育经历:1999/9-2003/7,清华大学,电机工程与应用电子技术系,工学博士1992/9-1996/7,浙江大学,电机工程学系,工学学士国家电力可靠性标准委员会委员,国内核心期刊《电测与仪表》、《电力系统保护与控制》、《电力系统及其自动化学报》编委及《新型工业化》副主编,曾任香港理工大学、澳大利亚悉尼科技大学外聘博士生导师。主持国家自然科学基金4项和省部级项目6项,横向项目超过50余项,其中单项超过500万项目4项。发表(含录用)各类论文260余篇,近五年为180篇;专著2本;共计发表(含录用)国际SCI源刊论文70余篇(第一或通信作者58篇,28篇为一区Top期刊)。获得中国电力创新一等奖(第1)、中国电力技术发明二等奖(第2)、江苏省科学技术三等奖(第1)、北京市科技进步奖一项、国网公司科技发明一等奖一项和南方电网科技进步奖3项。个人简介:自适应控制基于MDP的强化学习控制基于SMDP的改进强化学习控制多智能体随机均衡对策理论虚拟发电部落分散自律控制基于CPSS的调度机器人与知识自动化微元网自组织协同演化与群体智能决策2007南方电网科技进步二等奖2012年结题“优秀”2011年结题“优秀”2011年结题“优秀”2005年至2007年三项调度课题2008国家自然科学青年基金2009年广东省自然科学基金2010年中央高校基本业务费重点项目2011年清华大学国家重点实验室重点项目2011年国家自然科学基金面上项目2012年863“智能电网二期”重大项目子课题2013年973国家重大基础理论子课题2014年国家自然科学基金面上项目2017年国家自然科学基金面上项目2016年结题“优秀”(全票当选)理论研究深度展开项目研究纵向发展2017年结题“优秀”国内知名的智能发电调度与控制领域专业团队2017年配用电知识自动化技术获国网技术发明一等奖(排名2)目录0.课题研究背景及意义1.面向下一代能源电...