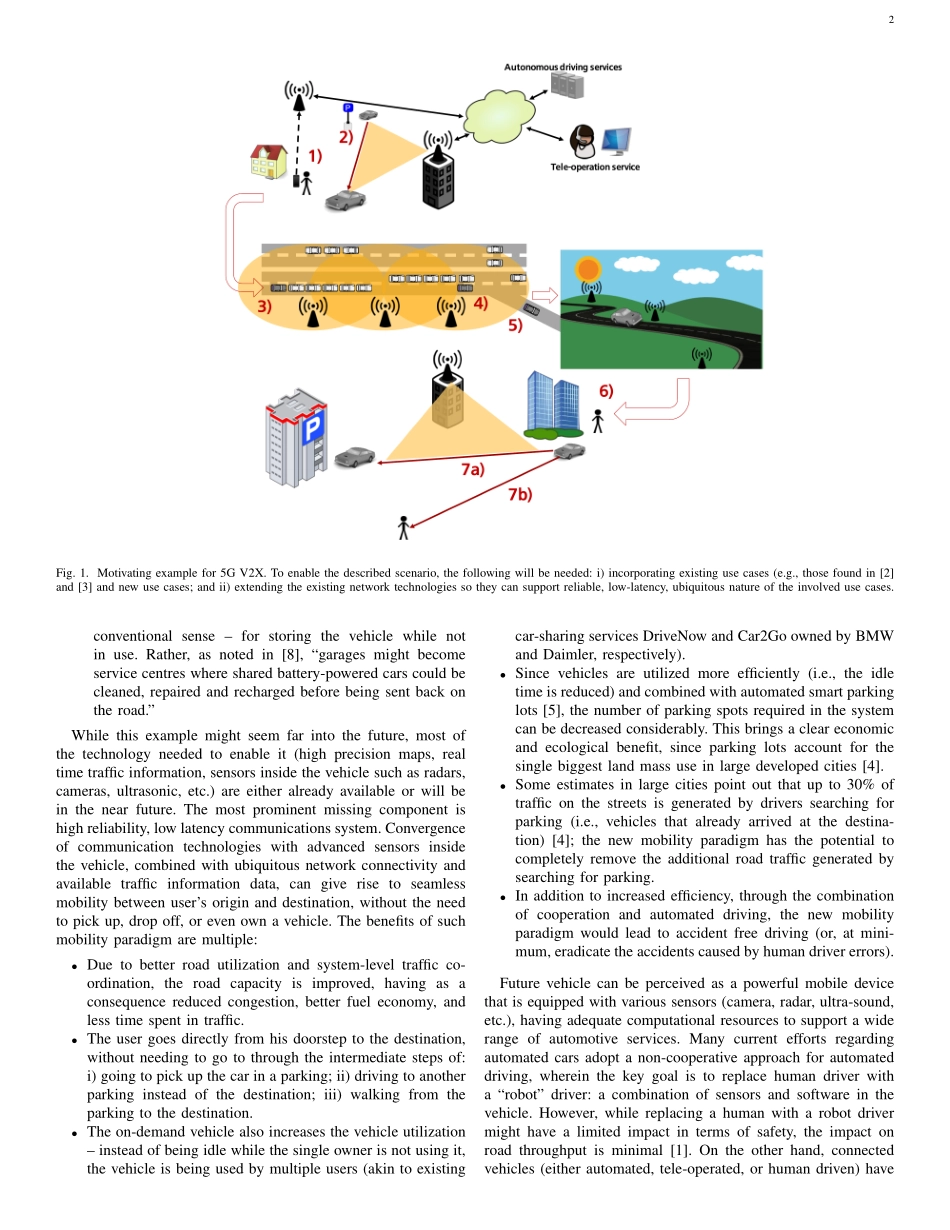
1UseCases,Requirements,andDesignConsiderationsfor5GV2XMateBoban,ApostolosKousaridas,KonstantinosManolakis,JosephEichinger,WenXuHuaweiTechnologies,GermanResearchCenter,80992Munich,GermanyEmail:mate.boban@huawei.comAbstract—UltimategoalofnextgenerationVehicle-to-everything(V2X)communicationsystemsisenablingaccident-freecooperativeautomateddrivingthatusestheavailableroadwayefficiently.Toachievethisgoal,thecommunicationsystemwillneedtoenableadiversesetofusecases,eachwithaspecificsetofrequirements.Wediscussthemainusecasecategories,analyzetheirrequirements,andcomparethemagainstthecapabilitiesofcurrentlyavailablecommunicationtechnologies.Basedontheanalysis,weidentifyagapandpointouttowardspossiblesystemdesignfor5GV2Xthatcouldclosethegap.Furthermore,wediscussanarchitectureofthe5GV2Xradioaccessnetworkthatincorporatesdiversecommunicationtechnologies,includingcurrentandcellularsystemsincentimeterwaveandmillimeterwave,IEEE802.11pandvehicularvisiblelightcommunications.Finally,wediscusstheroleoffuture5GV2Xsystemsinenablingmoreefficientvehiculartransportation:fromimprovedtrafficflowthroughreducedinter-vehiclespacingonhighwaysandcoordinatedintersectionsincities(thecheapestwaytoincreasingtheroadcapacity),toautomatedsmartparking(nomorevisitstotheparking!),ultimatelyenablingseamlessend-to-endpersonalmobility.I.INTRODUCTIONPersonalmobilityandvehiculartransportationsystemsingen-eralareundergoingsomewhatofarevolution.Thereasonsforthiscanbefoundinthenewsocietalandmarkettrends.Themainnewsocietaltrendsaffectingthetransportationare:i)newwaveofurbanizationcreatingpressureontheexistingtransportationinfrastructure,whichcannotgrowasfastasthedemand;ii)evermorestringentemission-andenergy-relatedregulation;andiii)highpressureonpublictransportandlogistics/deliveryservicestobecomemoreadaptiveanddynamic.Thekeymarkettrendsare:i)theadventofautomateddriving;ii)newmodesofcaruseandownership(i.e.,ashifttowardsthe“sharedeconomy”);andiii)liveandopendataavailability,includingcrowdsourcingandopenplatforms,...