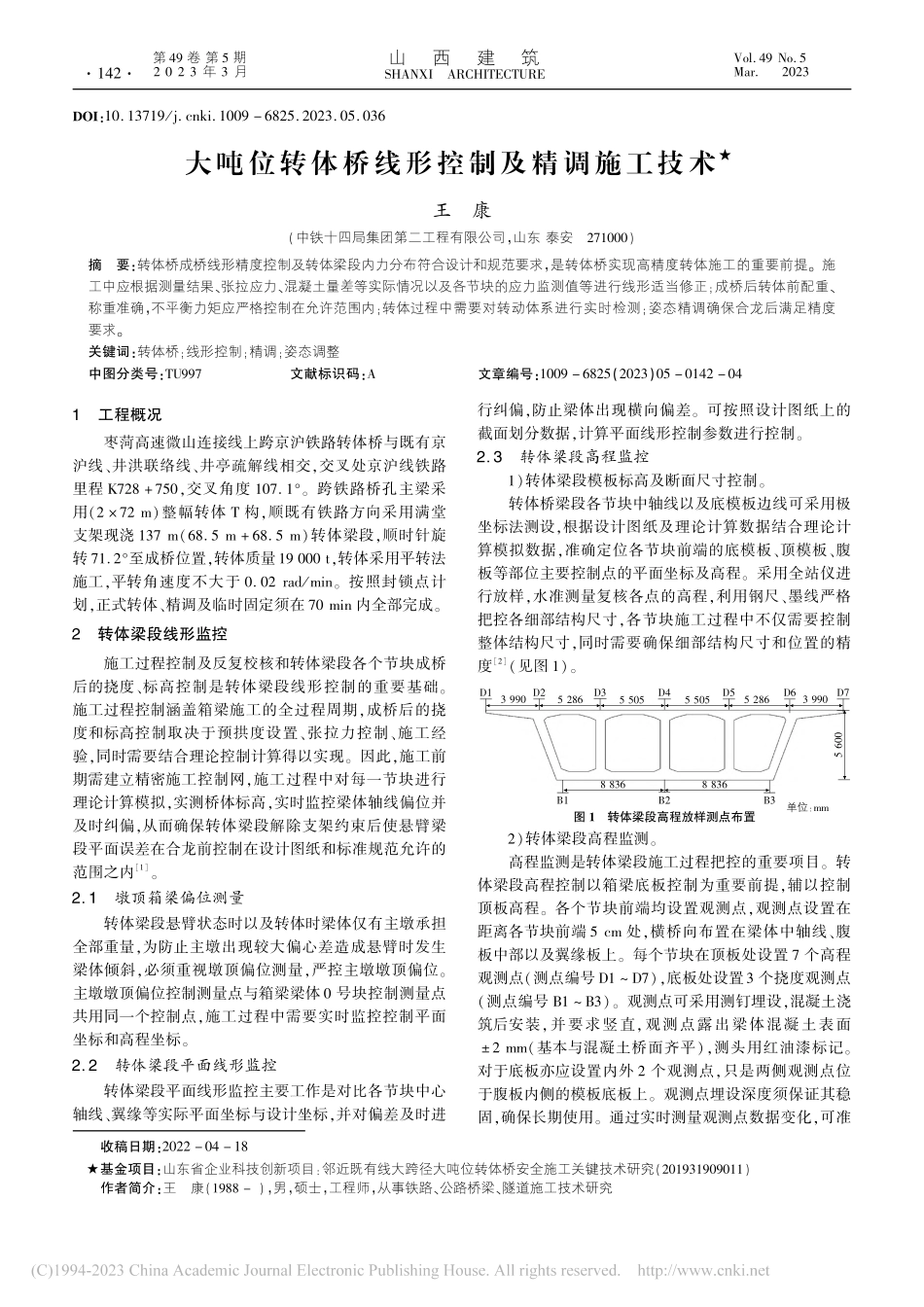
DOI:10.13719/j.cnki.1009-6825.2023.05.036大吨位转体桥线形控制及精调施工技术★收稿日期:2022-04-18★基金项目:山东省企业科技创新项目:邻近既有线大跨径大吨位转体桥安全施工关键技术研究(201931909011)作者简介:王康(1988-),男,硕士,工程师,从事铁路、公路桥梁、隧道施工技术研究王康(中铁十四局集团第二工程有限公司,山东泰安271000)摘要:转体桥成桥线形精度控制及转体梁段内力分布符合设计和规范要求,是转体桥实现高精度转体施工的重要前提。施工中应根据测量结果、张拉应力、混凝土量差等实际情况以及各节块的应力监测值等进行线形适当修正;成桥后转体前配重、称重准确,不平衡力矩应严格控制在允许范围内;转体过程中需要对转动体系进行实时检测;姿态精调确保合龙后满足精度要求。关键词:转体桥;线形控制;精调;姿态调整中图分类号:TU997文献标识码:A文章编号:1009-6825(2023)05-0142-041工程概况枣菏高速微山连接线上跨京沪铁路转体桥与既有京沪线、井洪联络线、井亭疏解线相交,交叉处京沪线铁路里程K728+750,交叉角度107.1°。跨铁路桥孔主梁采用(2×72m)整幅转体T构,顺既有铁路方向采用满堂支架现浇137m(68.5m+68.5m)转体梁段,顺时针旋转71.2°至成桥位置,转体质量19000t,转体采用平转法施工,平转角速度不大于0.02rad/min。按照封锁点计划,正式转体、精调及临时固定须在70min内全部完成。2转体梁段线形监控施工过程控制及反复校核和转体梁段各个节块成桥后的挠度、标高控制是转体梁段线形控制的重要基础。施工过程控制涵盖箱梁施工的全过程周期,成桥后的挠度和标高控制取决于预拱度设置、张拉力控制、施工经验,同时需要结合理论控制计算得以实现。因此,施工前期需建立精密施工控制网,施工过程中对每一节块进行理论计算模拟,实测桥体标高,实时监控梁体轴线偏位并及时纠偏,从而确保转体梁段解除支架约束后使悬臂梁段平面误差在合龙前控制在设计图纸和标准规范允许的范围之内[1]。2.1墩顶箱梁偏位测量转体梁段悬臂状态时以及转体时梁体仅有主墩承担全部重量,为防止主墩出现较大偏心差造成悬臂时发生梁体倾斜,必须重视墩顶偏位测量,严控主墩墩顶偏位。主墩墩顶偏位控制测量点与箱梁梁体0号块控制测量点...