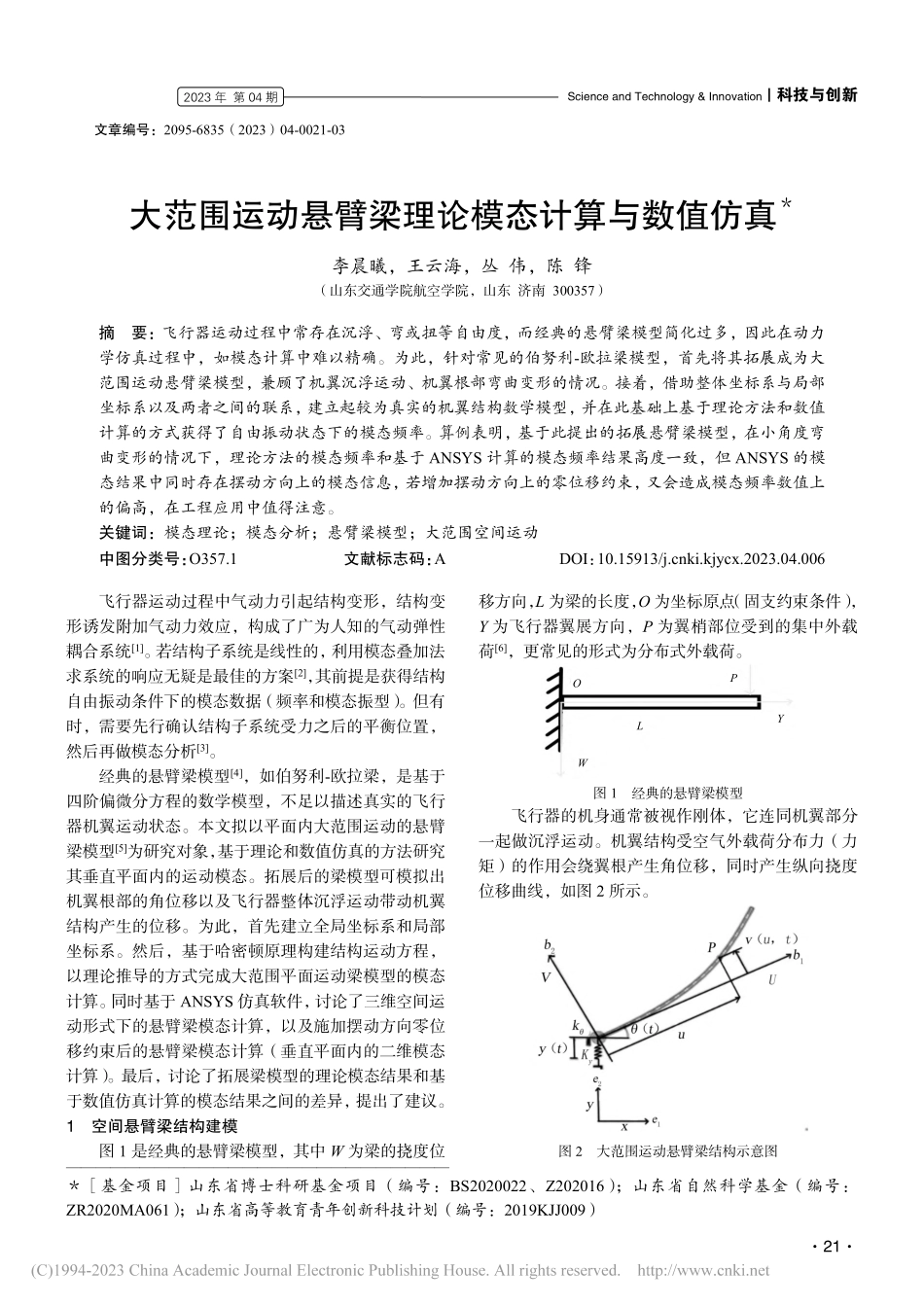
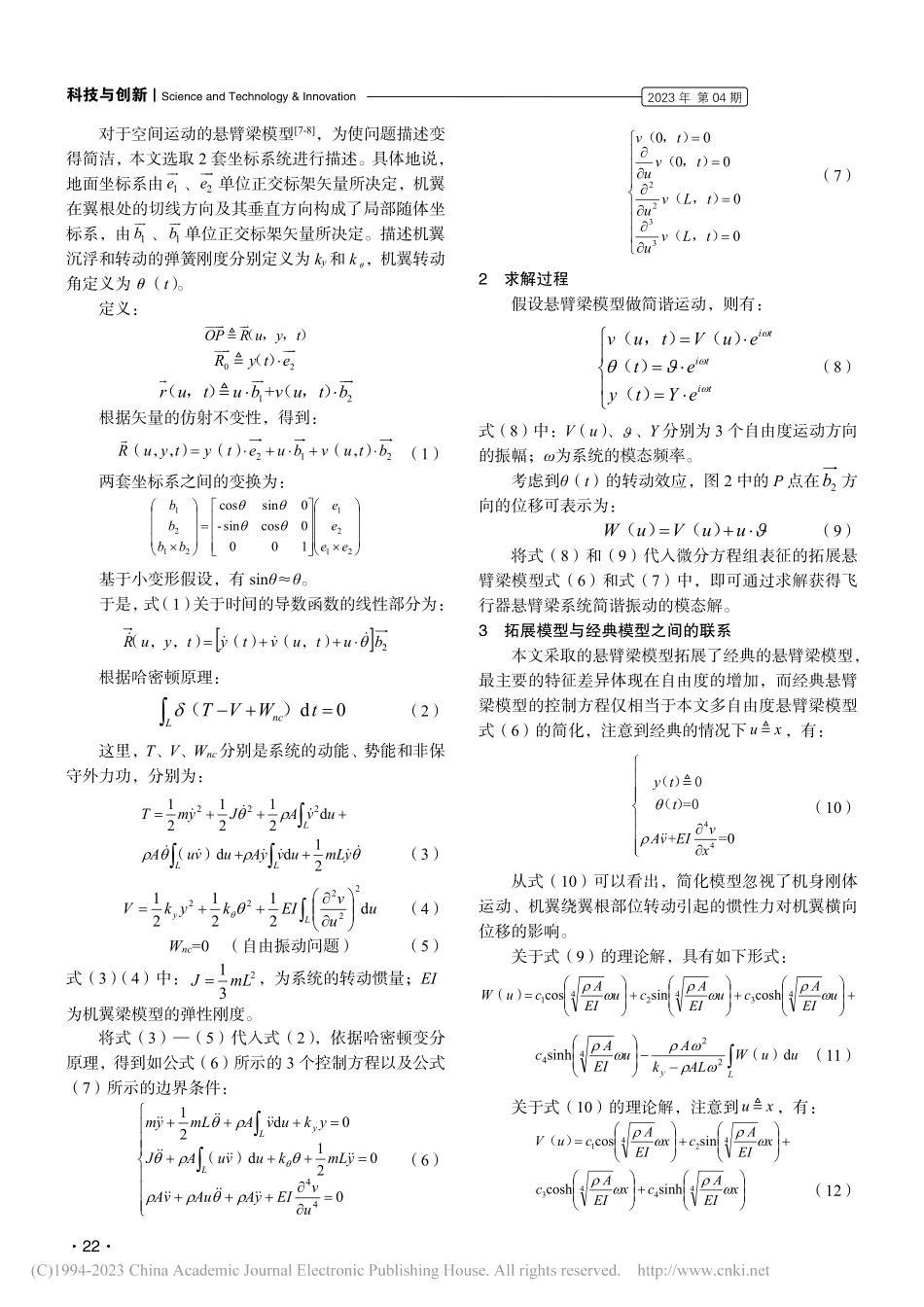
ScienceandTechnology&Innovation┃科技与创新2023年第04期·21·文章编号:2095-6835(2023)04-0021-03大范围运动悬臂梁理论模态计算与数值仿真*李晨曦,王云海,丛伟,陈锋(山东交通学院航空学院,山东济南300357)摘要:飞行器运动过程中常存在沉浮、弯或扭等自由度,而经典的悬臂梁模型简化过多,因此在动力学仿真过程中,如模态计算中难以精确。为此,针对常见的伯努利-欧拉梁模型,首先将其拓展成为大范围运动悬臂梁模型,兼顾了机翼沉浮运动、机翼根部弯曲变形的情况。接着,借助整体坐标系与局部坐标系以及两者之间的联系,建立起较为真实的机翼结构数学模型,并在此基础上基于理论方法和数值计算的方式获得了自由振动状态下的模态频率。算例表明,基于此提出的拓展悬臂梁模型,在小角度弯曲变形的情况下,理论方法的模态频率和基于ANSYS计算的模态频率结果高度一致,但ANSYS的模态结果中同时存在摆动方向上的模态信息,若增加摆动方向上的零位移约束,又会造成模态频率数值上的偏高,在工程应用中值得注意。关键词:模态理论;模态分析;悬臂梁模型;大范围空间运动中图分类号:O357.1文献标志码:ADOI:10.15913/j.cnki.kjycx.2023.04.006飞行器运动过程中气动力引起结构变形,结构变形诱发附加气动力效应,构成了广为人知的气动弹性耦合系统[1]。若结构子系统是线性的,利用模态叠加法求系统的响应无疑是最佳的方案[2],其前提是获得结构自由振动条件下的模态数据(频率和模态振型)。但有时,需要先行确认结构子系统受力之后的平衡位置,然后再做模态分析[3]。经典的悬臂梁模型[4],如伯努利-欧拉梁,是基于四阶偏微分方程的数学模型,不足以描述真实的飞行器机翼运动状态。本文拟以平面内大范围运动的悬臂梁模型[5]为研究对象,基于理论和数值仿真的方法研究其垂直平面内的运动模态。拓展后的梁模型可模拟出机翼根部的角位移以及飞行器整体沉浮运动带动机翼结构产生的位移。为此,首先建立全局坐标系和局部坐标系。然后,基于哈密顿原理构建结构运动方程,以理论推导的方式完成大范围平面运动梁模型的模态计算。同时基于ANSYS仿真软件,讨论了三维空间运动形式下的悬臂梁模态计算,以及施加摆动方向零位移约束后的悬臂梁模态计算(垂直平面内的二维模态计算)。最后,讨论了拓展梁模型的理论模态结果和基于数值仿真计算的模态结果之间的差异,提出了建议。1空间悬臂梁结构建模图1是经典的悬臂梁模型,其中W为梁的挠度位移方向,L为...