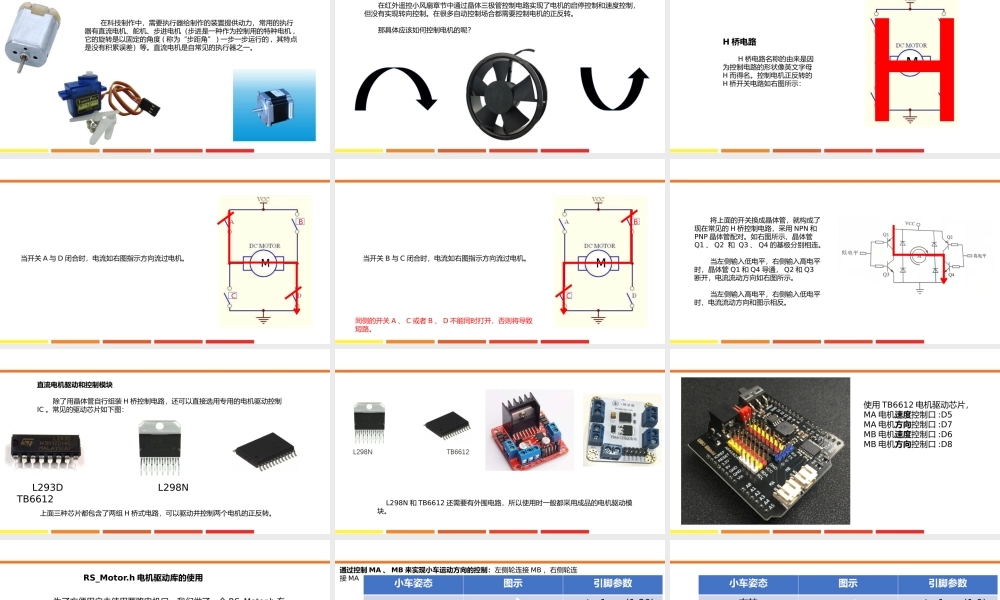
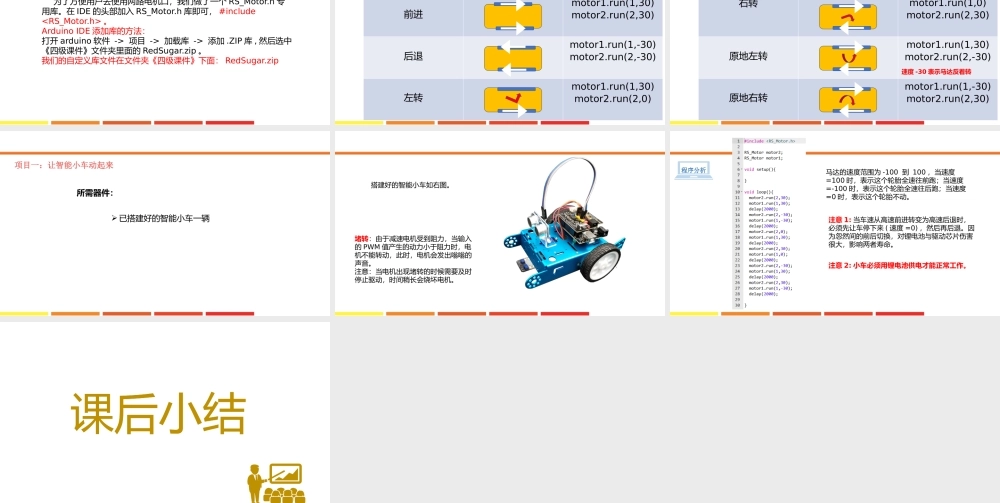
ArduinoUNO---让智能小车动起来在科技制作中,需要执行器给制作的装置提供动力,常用的执行器有直流电机、舵机、步进电机(步进是一种作为控制用的特种电机,它的旋转是以固定的角度(称为“步距角”)一步一步运行的,其特点是没有积累误差)等。直流电机是自常见的执行器之一。在红外遥控小风扇章节中通过晶体三极管控制电路实现了电机的启停控制和速度控制,但没有实现转向控制。在很多自动控制场合都需要控制电机的正反转。那具体应该如何控制电机的呢?H桥电路H桥电路名称的由来是因为控制电路的形状像英文字母H而得名。控制电机正反转的H桥开关电路如右图所示:MHMCB当开关A与D闭合时,电流如右图指示方向流过电机。MCB当开关B与C闭合时,电流如右图指示方向流过电机。同侧的开关A、C或者B、D不能同时打开,否则将导致短路。将上面的开关换成晶体管,就构成了现在常见的H桥控制电路,采用NPN和PNP晶体管配对。如右图所示,晶体管Q1、Q2和Q3、Q4的基极分别相连。当左侧输入低电平,右侧输入高电平时,晶体管Q1和Q4导通,Q2和Q3断开,电流流动方向如右图所示。当左侧输入高电平,右侧输入低电平时,电流流动方向和图示相反。直流电机驱动和控制模块除了用晶体管自行组装H桥控制电路,还可以直接选用专用的电机驱动控制IC。常见的驱动芯片如下图:L293DL298NTB6612上面三种芯片都包含了两组H桥式电路,可以驱动并控制两个电机的正反转。L298N和TB6612还需要有外围电路,所以使用时一般都采用成品的电机驱动模块。使用TB6612电机驱动芯片,MA电机速度控制口:D5MA电机方向控制口:D7MB电机速度控制口:D6MB电机方向控制口:D8RS_Motor.h电机驱动库的使用为了方便用户去使用两路电机口,我们做了一个RS_Motor.h专用库。在IDE的头部加入RS_Motor.h库即可,#include。ArduinoIDE添加库的方法:打开arduino软件->项目->加载库->添加.ZIP库,然后选中《四级课件》文件夹里面的RedSugar.zip。我们的自定义库文件在文件夹《四级课件》下面:RedSugar.zip小车姿态图示引脚参数前进motor1.run(1,30)motor2.run(2,30)后退motor1.run(1,-30)motor2.run(2,-30)左转motor1.run(1,30)motor2.run(2,0)通过控制MA、MB来实现小车运动方向的控制:左侧轮连接MB,右侧轮连接MA小车姿态图示引脚参数右转motor1.run(1,0)motor2.run(2,30)原地左转motor1.run(1,30)motor2.run(2,-30)原地右转motor1.run(1,-30)motor2.run(2,30)速度-30表示马达反着转项目一:让智能小...