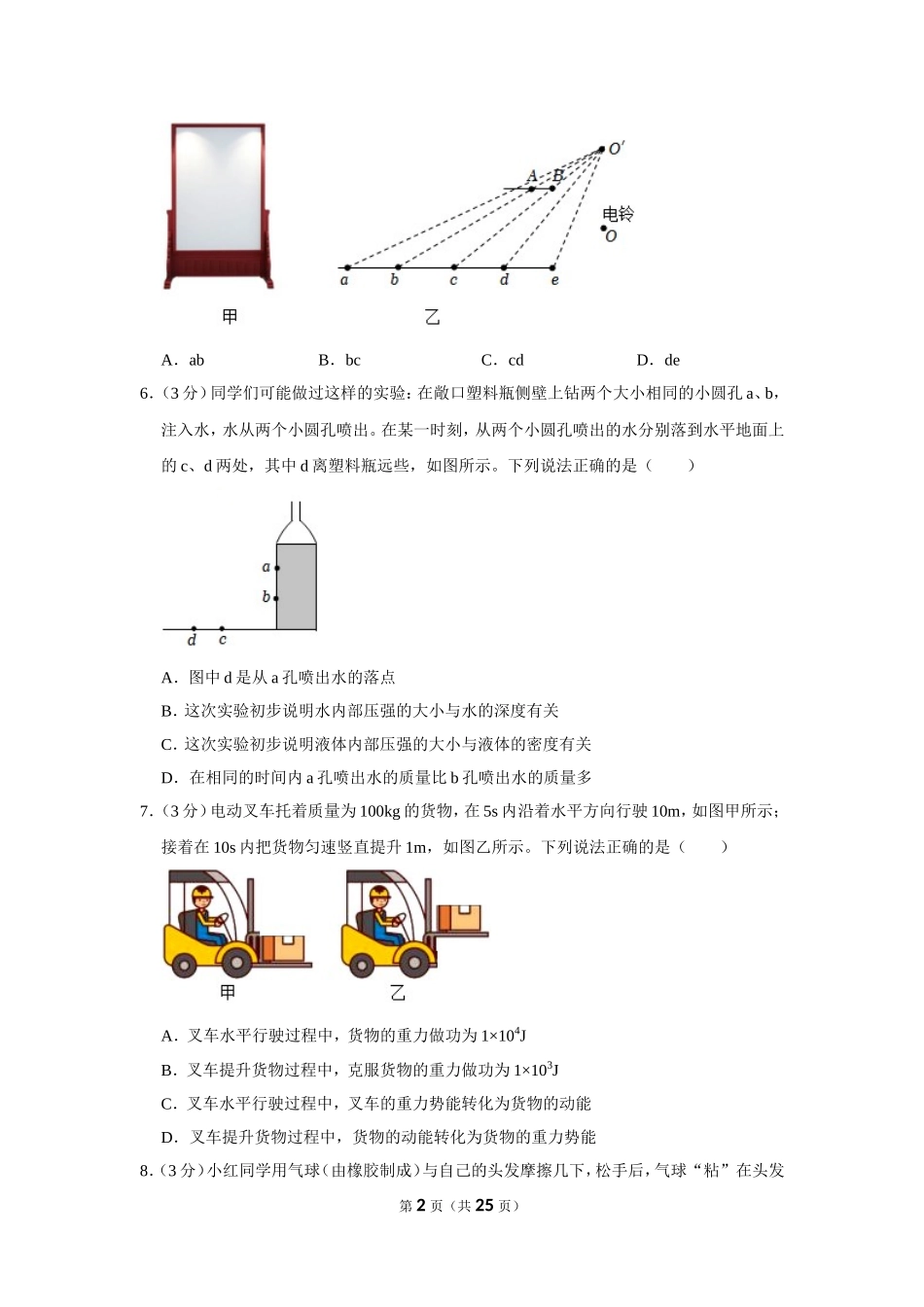
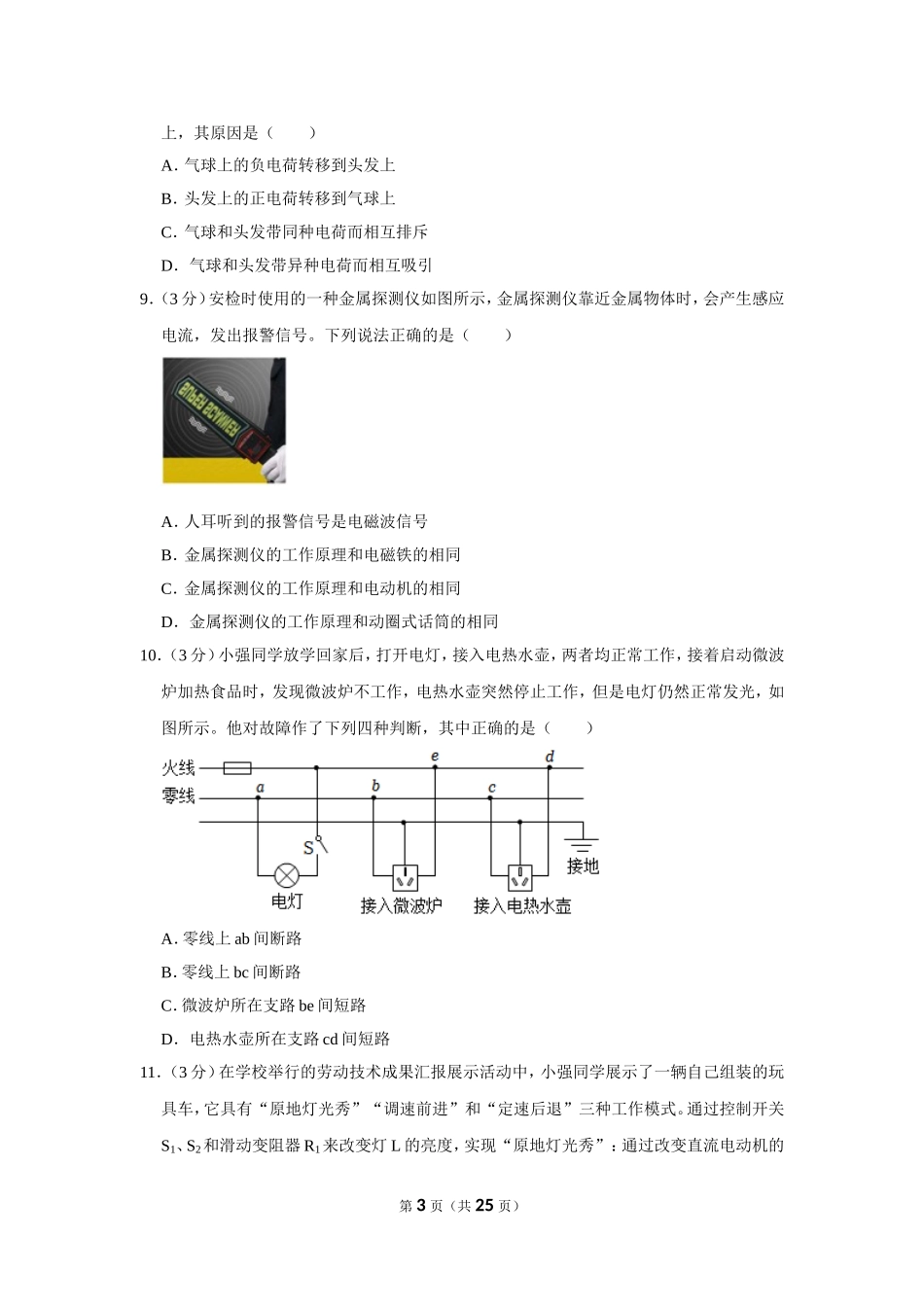
2023年湖北省武汉市中考物理试卷一、选择题(共12小题,每小题3分,满分36分)1.(3分)在中小学爱国主义教育活动中,某学校组织师生观看电影《闪闪的红星》,影片中有歌词“小小竹排江中游,巍巍青山两岸走”,其中“青山……走”所选的参照物是()A.竹排B.江岸C.房屋D.青山2.(3分)在清晨,人们经常看到湖面上大雾逐渐散去,这是()A.升华现象B.凝华现象C.汽化现象D.熔化现象3.(3分)如图所示,小红同学正在演奏古筝,听众分辨出古筝的声音,是依据声音的()A.响度B.音调C.音色D.速度4.(3分)太阳是人类能源的宝库。下列说法正确的是()A.能量的转化和转移是有方向性、不可逆的B.太阳能是太阳内部氢原子核发生裂变释放的能量C.太阳能是未来的理想能源之一,是不可再生能源D.中国空间站上用到的太阳能电池板是将太阳能直接转化为化学能5.(3分)一块仪容镜如图甲所示,放在某学校走廊的AB处,仪容镜靠墙而立,镜面与墙壁平行,在另一面墙壁上的O处悬挂一电铃,如图乙所示。为了总能看到电铃通过仪容镜所成的像O',小强同学沿着走廊的ae直线走动,若将人和电铃各自看作一个点,则小强同学所在的区间是()第1页(共25页)A.abB.bcC.cdD.de6.(3分)同学们可能做过这样的实验:在敞口塑料瓶侧壁上钻两个大小相同的小圆孔a、b,注入水,水从两个小圆孔喷出。在某一时刻,从两个小圆孔喷出的水分别落到水平地面上的c、d两处,其中d离塑料瓶远些,如图所示。下列说法正确的是()A.图中d是从a孔喷出水的落点B.这次实验初步说明水内部压强的大小与水的深度有关C.这次实验初步说明液体内部压强的大小与液体的密度有关D.在相同的时间内a孔喷出水的质量比b孔喷出水的质量多7.(3分)电动叉车托着质量为100kg的货物,在5s内沿着水平方向行驶10m,如图甲所示;接着在10s内把货物匀速竖直提升1m,如图乙所示。下列说法正确的是()A.叉车水平行驶过程中,货物的重力做功为1×104JB.叉车提升货物过程中,克服货物的重力做功为1×103JC.叉车水平行驶过程中,叉车的重力势能转化为货物的动能D.叉车提升货物过程中,货物的动能转化为货物的重力势能8.(3分)小红同学用气球(由橡胶制成)与自己的头发摩擦几下,松手后,气球“粘”在头发第2页(共25页)上,其原因是()A.气球上的负电荷转移到头发上B.头发上的正电荷转移到气球上C.气球和头发带同种电荷而相互排斥D.气球和头发带异种电荷而相互吸引9.(3分)安...