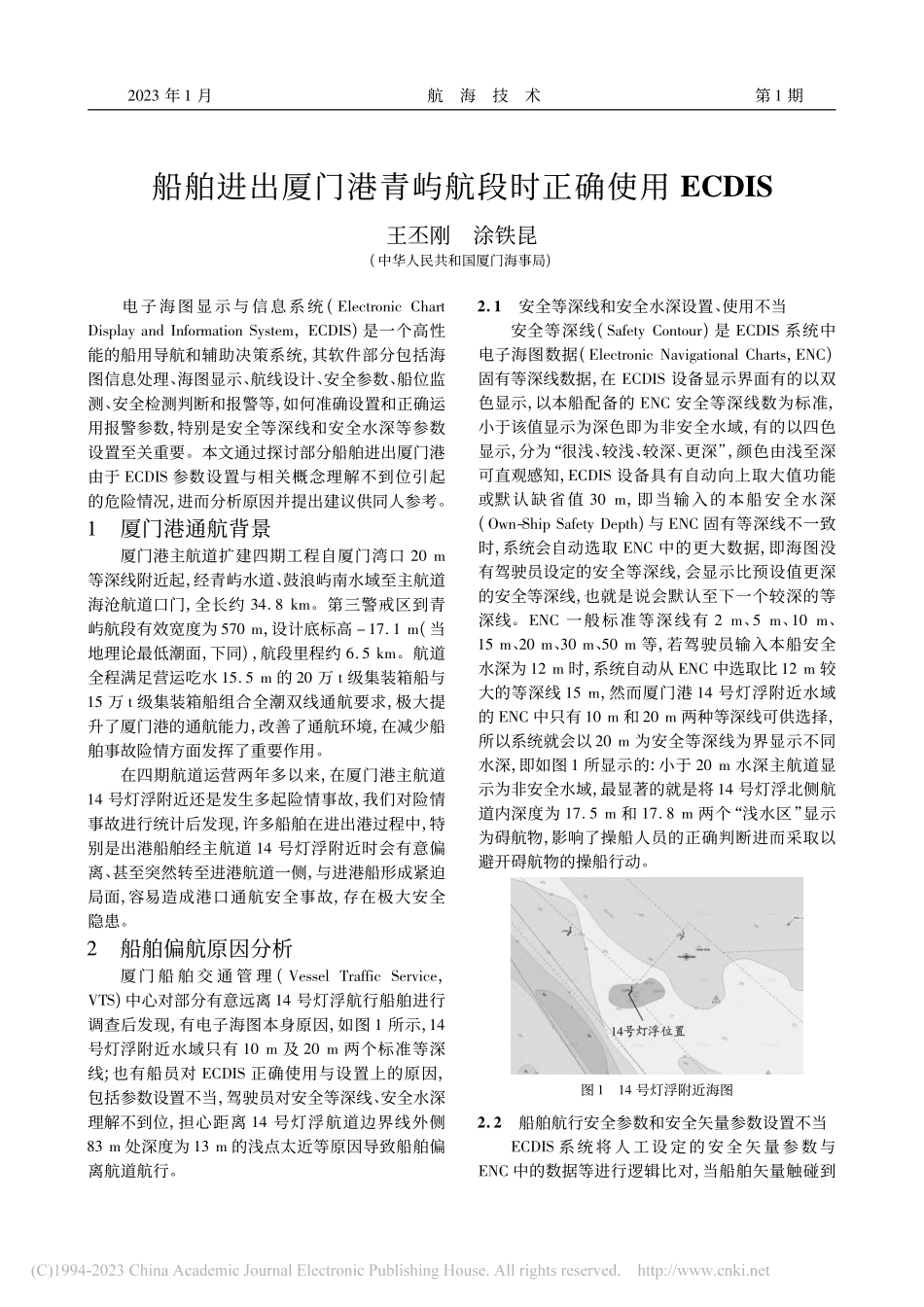
2023年1月航海技术第1期船舶进出厦门港青屿航段时正确使用ECDIS王丕刚涂铁昆(中华人民共和国厦门海事局)电子海图显示与信息系统(ElectronicChartDisplayandInformationSystem,ECDIS)是一个高性能的船用导航和辅助决策系统,其软件部分包括海图信息处理、海图显示、航线设计、安全参数、船位监测、安全检测判断和报警等,如何准确设置和正确运用报警参数,特别是安全等深线和安全水深等参数设置至关重要。本文通过探讨部分船舶进出厦门港由于ECDIS参数设置与相关概念理解不到位引起的危险情况,进而分析原因并提出建议供同人参考。1厦门港通航背景厦门港主航道扩建四期工程自厦门湾口20m等深线附近起,经青屿水道、鼓浪屿南水域至主航道海沧航道口门,全长约34.8km。第三警戒区到青屿航段有效宽度为570m,设计底标高-17.1m(当地理论最低潮面,下同),航段里程约6.5km。航道全程满足营运吃水15.5m的20万t级集装箱船与15万t级集装箱船组合全潮双线通航要求,极大提升了厦门港的通航能力,改善了通航环境,在减少船舶事故险情方面发挥了重要作用。在四期航道运营两年多以来,在厦门港主航道14号灯浮附近还是发生多起险情事故,我们对险情事故进行统计后发现,许多船舶在进出港过程中,特别是出港船舶经主航道14号灯浮附近时会有意偏离、甚至突然转至进港航道一侧,与进港船形成紧迫局面,容易造成港口通航安全事故,存在极大安全隐患。2船舶偏航原因分析厦门船舶交通管理(VesselTrafficService,VTS)中心对部分有意远离14号灯浮航行船舶进行调查后发现,有电子海图本身原因,如图1所示,14号灯浮附近水域只有10m及20m两个标准等深线;也有船员对ECDIS正确使用与设置上的原因,包括参数设置不当,驾驶员对安全等深线、安全水深理解不到位,担心距离14号灯浮航道边界线外侧83m处深度为13m的浅点太近等原因导致船舶偏离航道航行。2.1安全等深线和安全水深设置、使用不当安全等深线(SafetyContour)是ECDIS系统中电子海图数据(ElectronicNavigationalCharts,ENC)固有等深线数据,在ECDIS设备显示界面有的以双色显示,以本船配备的ENC安全等深线数为标准,小于该值显示为深色即为非安全水域,有的以四色显示,分为“很浅、较浅、较深、更深”,颜色由浅至深可直观感知,ECDIS设备具有自动向上取大值功能或默认缺省值30m,即当输入的本船安全水深(Own-ShipSafetyDepth)与ENC固有等深线不一致时,系统会自动选取ENC中的更大数据,即海图没有驾驶员设定的...