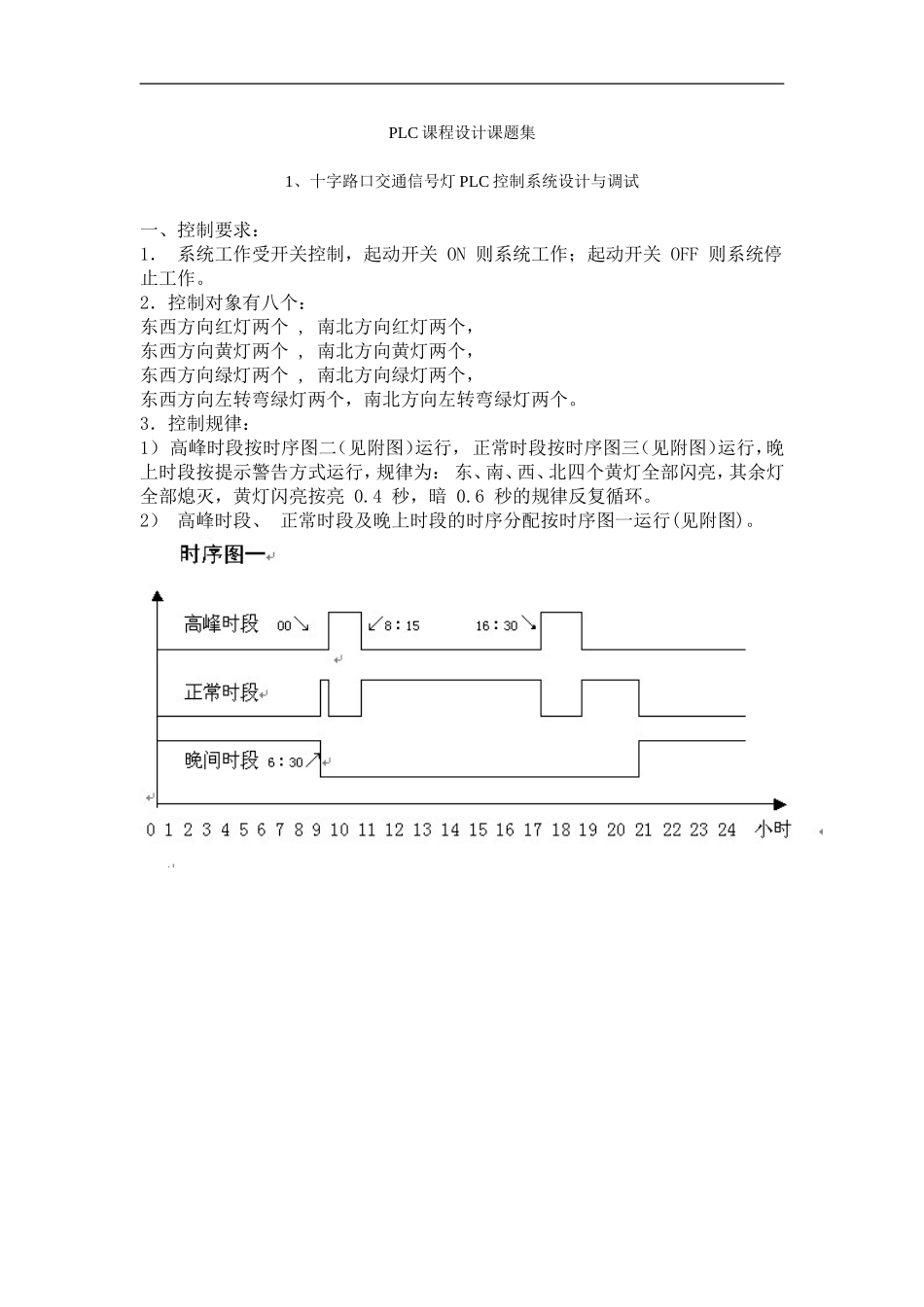
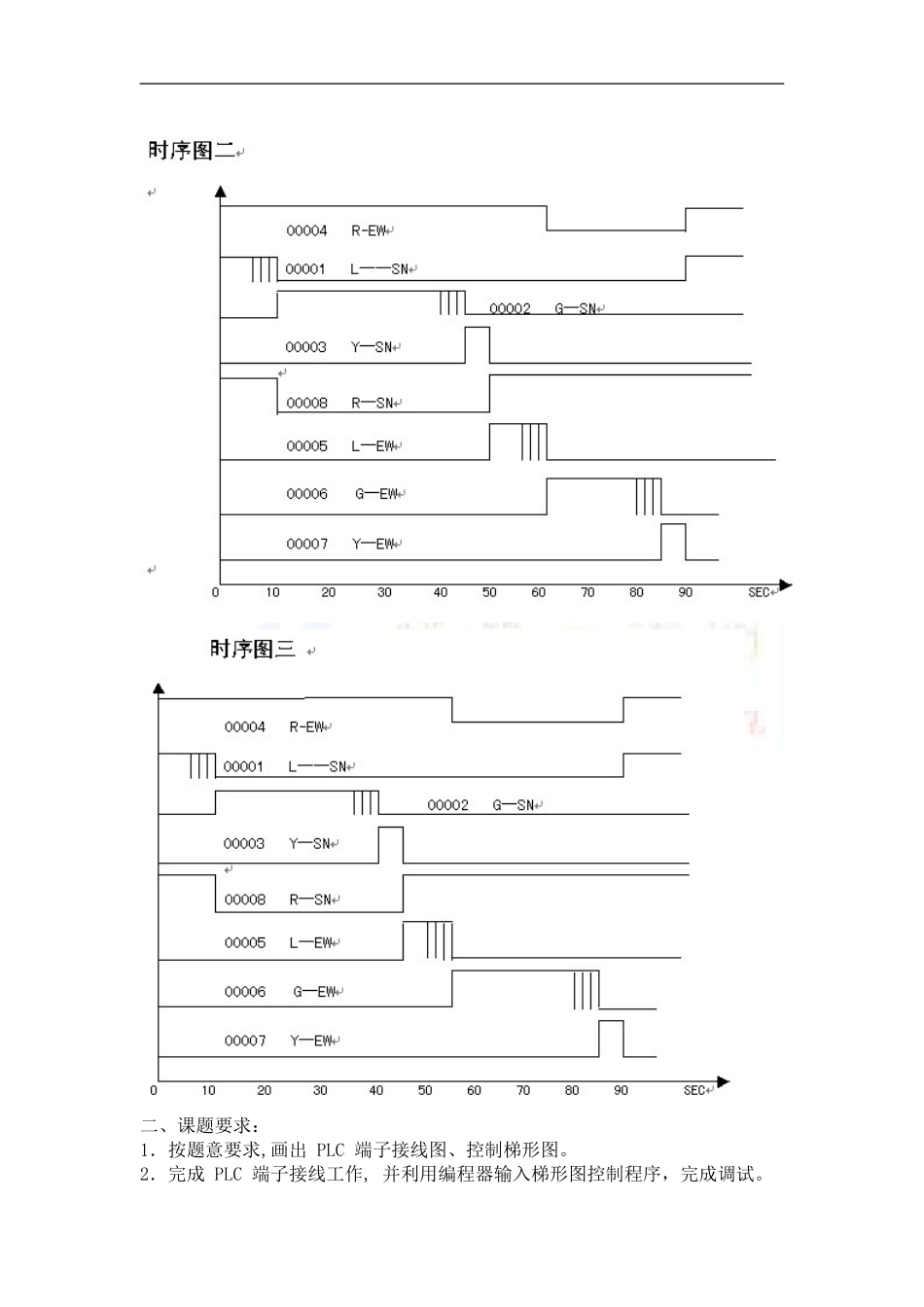
PLC课程设计课题集1、十字路口交通信号灯PLC控制系统设计与调试一、控制要求:1.系统工作受开关控制,起动开关ON则系统工作;起动开关OFF则系统停止工作。2.控制对象有八个:东西方向红灯两个,南北方向红灯两个,东西方向黄灯两个,南北方向黄灯两个,东西方向绿灯两个,南北方向绿灯两个,东西方向左转弯绿灯两个,南北方向左转弯绿灯两个。3.控制规律:1)高峰时段按时序图二(见附图)运行,正常时段按时序图三(见附图)运行,晚上时段按提示警告方式运行,规律为:东、南、西、北四个黄灯全部闪亮,其余灯全部熄灭,黄灯闪亮按亮0.4秒,暗0.6秒的规律反复循环。2)高峰时段、正常时段及晚上时段的时序分配按时序图一运行(见附图)。二、课题要求:1.按题意要求,画出PLC端子接线图、控制梯形图。2.完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成调试。3.完成课程设计说明书三、答辩问题:1.正常时段6:30的起始时间改为5:30,梯形图作如何改动?2.高峰时段16:30的起始时间改为16:00,梯形图作如何改动?3.正常时段东西左转弯绿灯45秒的起始时间改为40秒,梯形图作如何改动?4.高峰时段东西左转弯绿灯55秒的起始时间改为60秒,梯形图作如何改动?5.如何在交通控制灯起动时,校正当时的时钟?2、PLC控制变频调速系统设计与调试一、控制要求:1.变频调速器受0~10V输入电压控制:0V输出频率为0HZ,对应同步转速为0r/min;5V输出频率为50HZ,对应同步转速为1500r/min;10V输出频率为100HZ,对应同步转速为3000r/min;输入电压与输出频率按线性关系变化。2.要求输出转速按下图(见附图)函数变化,请编写梯形图控制程序,并完成调试3.改变输出转速~时间变化函数,重复上述过程。二、课题要求:1.按题意要求,画出PLC端子接线图及控制梯形图。2.完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成调试。3.完成课程设计说明书三、答辩问题:1.如何利用D/A1来输出五个斜率大于零的锯齿波(见附图)?2.如何利用D/A1来输出六个斜率小于零的锯齿波(见附图)?如何利用D/A2来输出三个三角波(见附图)?4.当输出的函数波形的时间座标改为小时,梯形图作何改动?5.当输出的函数波形的电压座标有改动,梯形图作何改动?3、五层电梯模型PLC控制系统设计与调试一、控制要求:1.系统应具备:有司机、无司机、消防三种工作模式。2.系统应具备下列几项控制功能:1)自动响应层楼召唤信号(含上召唤和下召唤)。2)自动响应轿厢服务指令信...