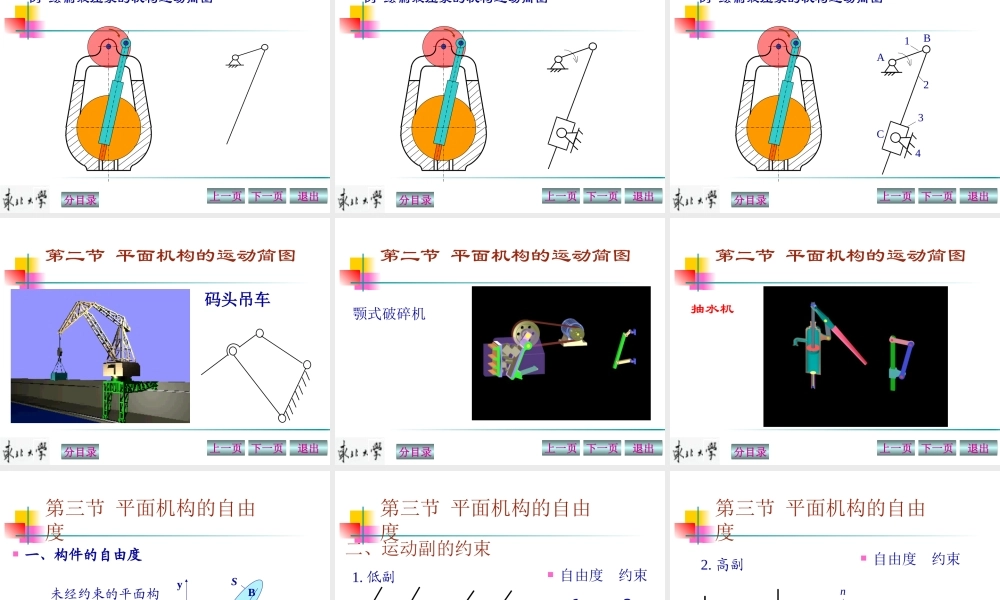
第一节平面机构的组成第二节平面机构的运动简图第三节平面机构的自由度本章目录下一页上一页退出下一页上一页退出分目录第一节平面机构的组成一、运动副及分类运动副:两个构件的可动联接下一页上一页退出分目录运动副低副高副转动副移动副凸轮副齿轮副按接触方式分第一节平面机构的组成下一页上一页退出分目录转动副第一节平面机构的组成下一页上一页退出分目录移动副第一节平面机构的组成下一页上一页退出分目录凸轮副第一节平面机构的组成下一页上一页退出分目录齿轮副第一节平面机构的组成下一页上一页退出分目录二、机构的组成机架主动件从动件从动件第一节平面机构的组成下一页上一页退出分目录第二节平面机构的运动简图用简单的线条和符号来表示构件和运动副,并按比例定出各运动副的位置,这种说明机构各构件间的相对运动关系的简化图形称为机构运动简图。用途:(1)分析已有的机构(2)创新设计机构(3)机构的运动分析举例下一页上一页退出分目录平面机构运动简图的绘制1.明确机构的组成:几个构件(机架、活动构件);几个运动副;运动副的形式,高副,低副。2.搞清机构的运动传递路线:运动从主动件依次到从动件。3.选择投影面:投影面为与构件运动平面相平行的平面。4.按比例绘图:取适当比例,用规定构件和运动副符号,绘制机构运动简图。第二节平面机构的运动简图下一页上一页退出分目录例绘制液压泵的机构运动简图下一页上一页退出分目录例绘制液压泵的机构运动简图下一页上一页退出分目录例绘制液压泵的机构运动简图下一页上一页退出分目录例绘制液压泵的机构运动简图下一页上一页退出分目录例绘制液压泵的机构运动简图1ABC234下一页上一页退出分目录码头吊车第二节平面机构的运动简图下一页上一页退出分目录颚式破碎机第二节平面机构的运动简图下一页上一页退出分目录抽水机第二节平面机构的运动简图下一页上一页退出分目录第三节平面机构的自由度一、构件的自由度未经约束的平面构件自由度:3平动2:x,y转动1:绕垂直于XOY平面的轴线yxASoB下一页上一页退出分目录二、运动副的约束自由度约束12121.低副第三节平面机构的自由度下一页上一页退出分目录自由度约束212.高副第三节平面机构的自由度nntt下一页上一页退出分目录三、机构的自由度(1)机构自由度计算公式hlPPnF23n——活动构件数目;Pl——低副的数目;Ph——高副的数目。第三节平面机构的自由度下一页上一页退出分目录(2)机构具有确定运动的条件主动构件数目n...