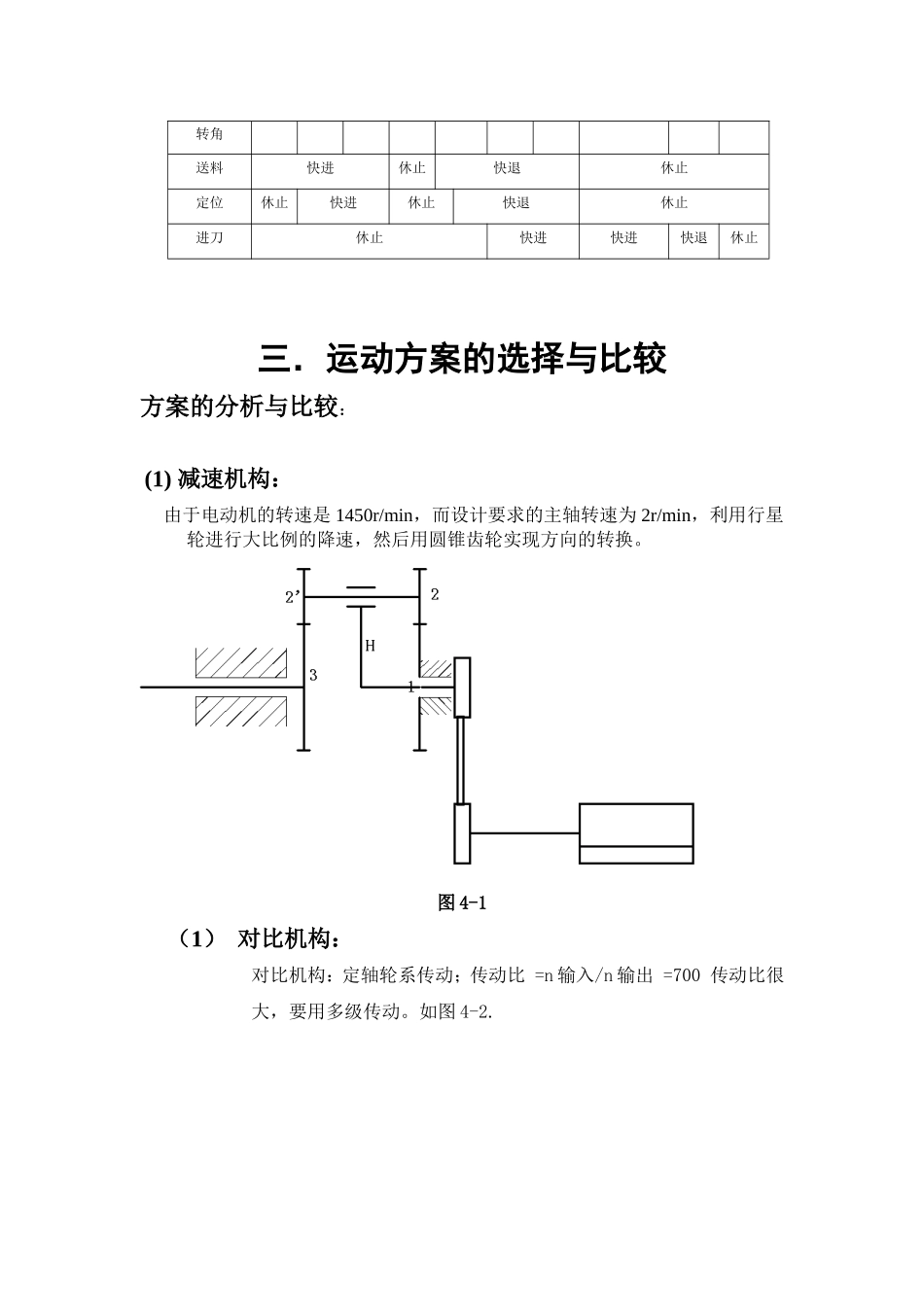
题目2半自动钻床2.1设计题目设计加工图1所示工件ф12mm孔的半自动钻床。进刀机构负责动力头的升降,送料机构将被加工工件推入加工位置,并由定位机构使被加工工件可靠固定。图1加工工件半自动钻床设计数据参看表3。表3半自动钻床凸轮设计数据方案号进料机构工作行程mm定位机构工作行程mm动力头工作行程mm电动机转速r/mm工作节拍(生产率)件/minA40301514501B35252014002C30201096012.2设计任务1.半自动钻床至少包括凸轮机构、齿轮机构在内的三种机构。2.设计传动系统并确定其传动比分配。3.图纸上画出半自动钻床的机构运动方案简图和运动循环图。4.凸轮机构的设计计算。按各凸轮机构的工作要求,自选从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。对盘状凸轮要用电算法计算出理论廓线、实际廓线值。画出从动件运动规律线图及凸轮廓线图。5.设计计算其他机构。6.编写设计计算说明书。7.学生可进一步完成:凸轮的数控加工,半自动钻床的计算机演示验证等。2.3设计提示1.钻头由动力头驱动,设计者只需考虑动力头的进刀(升降)运动。2.除动力头升降机构外,还需设计送料机构、定位机构。各机构运动循环要求见表4。3.可采用凸轮轴的方法分配协调各机构运动。表4机构运动循环要求凸轮轴10º20º30º45º60º75º90º105º~270º300º360º转角送料快进休止快退休止定位休止快进休止快退休止进刀休止快进快进快退休止三.运动方案的选择与比较方案的分析与比较:(1)减速机构:由于电动机的转速是1450r/min,而设计要求的主轴转速为2r/min,利用行星轮进行大比例的降速,然后用圆锥齿轮实现方向的转换。图4-1(1)对比机构:对比机构:定轴轮系传动;传动比=n输入/n输出=700传动比很大,要用多级传动。如图4-2.图4-2(3)进刀机构采用一个摆动滚子从动件盘行凸轮机构来传递齿轮齿条机构.因为我们用一个摆动滚子从动件盘行凸轮机构来传递齿轮机构,当进刀的时候,凸轮在推程阶段运行,很容易通过机构传递带动齿轮齿条啮合.带动动刀头来完成钻孔,摆杆转动的幅度也是等于齿廓转动的幅度,两个齿轮来传动也具有稳性。图4-3(4)对比机构:在摆杆上加一个平行四边行四杆机构,这样也可以来实现传动,但是当加了四杆机构以后并没有达到改善传动的效果,只是多增加了四杆机构,为了使机构结构紧凑,又能完成需要的传动,所以选择了一个摆动滚子从动件盘行凸轮机构。方案一:D1为了达到输出间歇运动同时能够做到循环往复运动,采用凸轮机构...