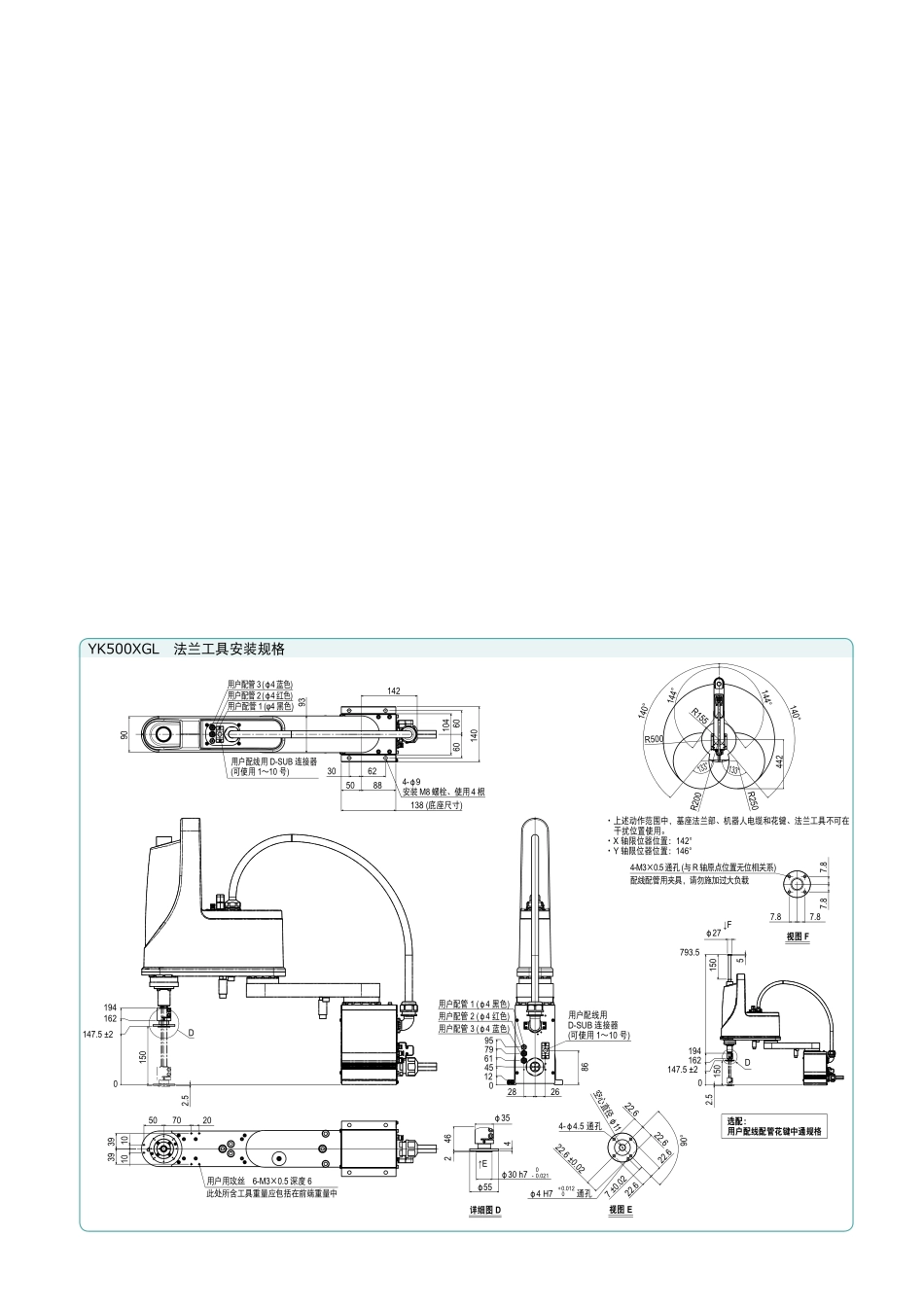
YK500XGLX轴Y轴Z轴R轴轴规格臂长(mm)250250150—旋转范围(°)±140±144—±360马达输出AC(W)20015050100减速机构减速器谐波齿轮驱动谐波齿轮驱动滚珠螺杆谐波齿轮驱动传导方式马达~减速器直接连接直接减速器~输出直接连接直接反复定位精度※1(XYZ:mm)(R:°)±0.01±0.01±0.004最高速度(XYZ:m/sec)(R:°/sec)5.11.11020最大搬运重量(kg)5标准周期时间:2kg可搬运时※2(sec)0.59R轴允许惯性力矩※3(kgm2)0.05kgm2(0.5kgfcms2)用户配线(sq×根)0.2×10用户配管(外径)φ4×3动作限位设定1.软限制2.限位器(X、Y、Z轴)机器人电缆长度(m)标准:3.5选配:5,10主机重量(kg)21※1.周围温度一定时的值(X、Y轴)。※2.水平方向300mm、垂直方向25mm往返、粗定位时。※3.在加速度系数的设定上有限制。●机械手臂长●最大搬运重量标准规格:中型YK500XGL01245617995862628����1(�4��)�����D-SUB���(���1�10�)����2(�4��)����3(�4��)9093142104606014030625088138(����)4-�9��M8�����4�����1(�4��)����2(�4��)����3(�4��)�����D-SUB���(���1�10�)10391039705020������6-M3�0.5��6��������������������A-A����15�����1140151.5±21962002432482742772966276740167174202222256441481633��������6734�16h7-0.0180�3530124756250250129(��������315)42571501.5Z���������Z�������Z���4mmZ�����������������AA0151.5±2793.5150�2751501.5↓F7.87.87.87.8����������������4-M3�0.5��(�R����������)140°140°144°144°442133°133°R155R500R250R200���������������・�������������������������������������・X�������142°・Y�������146°��F控制器电源容量(VA)运行方法RCX240S1000程序迹点定位遥控命令在线命令YK500XGLー150ーーーーRCX240SーーーーーBB机器人主机ーZ轴行程ー法兰工具ー中通规格ー电缆长度ー适用控制器ー支持CE标准ー扩展I/O※1ー网络选项ーiVY视觉系统ー电池150:150mm未填写:无未填写:无3L:3.5m未填写:标准N、P:标准I/O16/8未填写:无未填写:无BB:4个F:有S:有5L:5mE:CE规格N1、P1:40/24点CC:CC-LinkVY:iVY(VISION)10L:10mN2、P2:6...