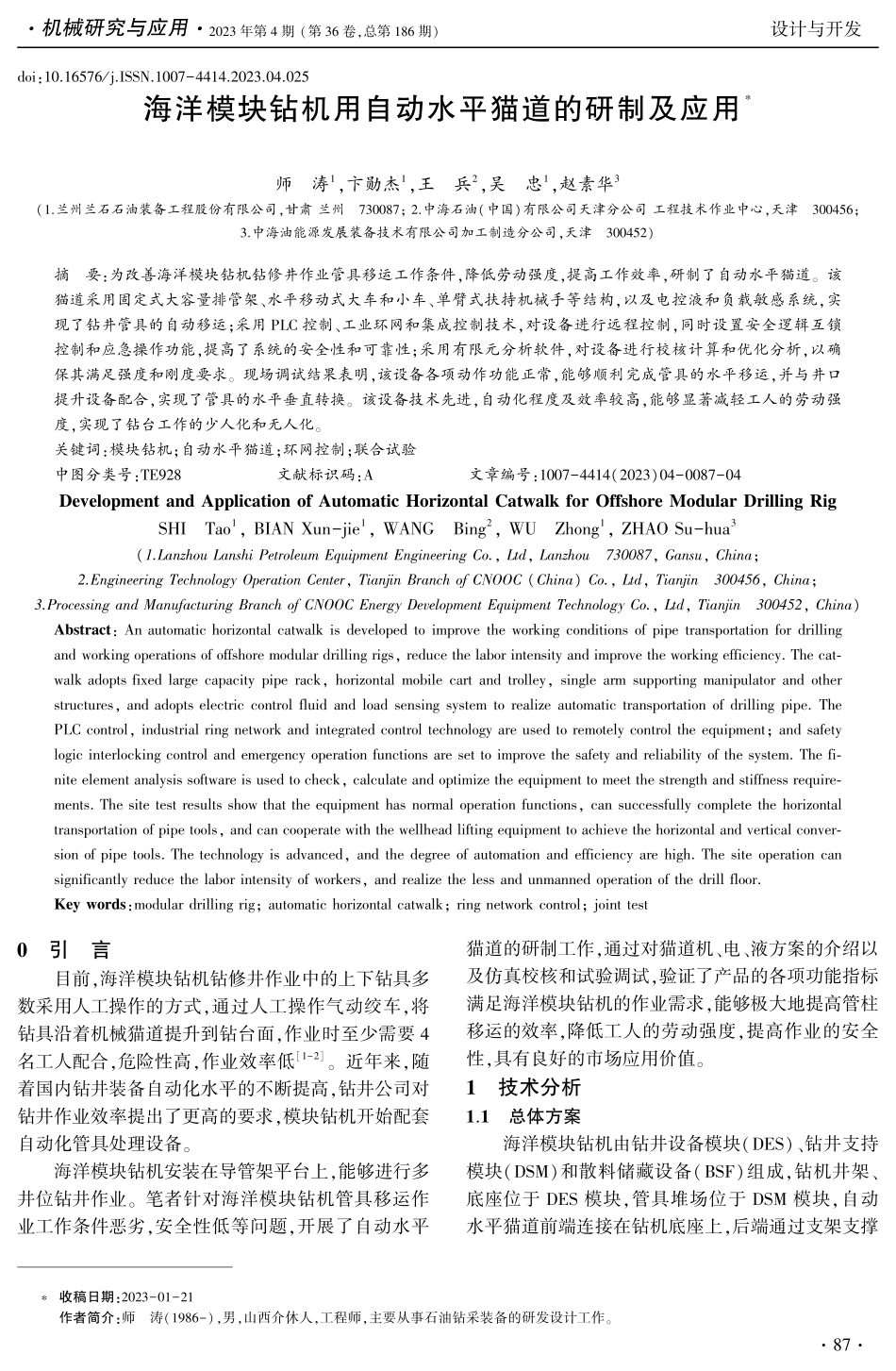
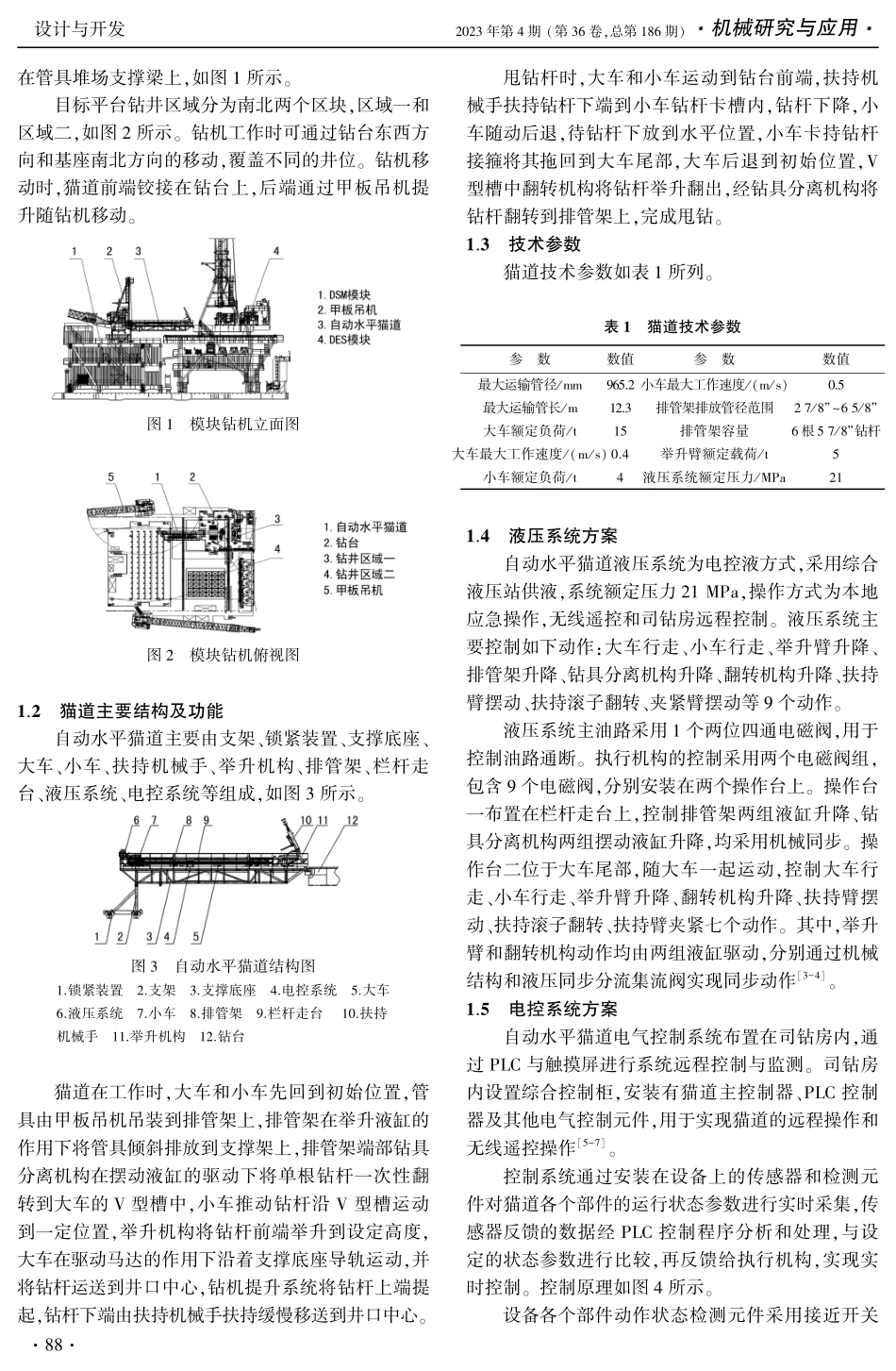
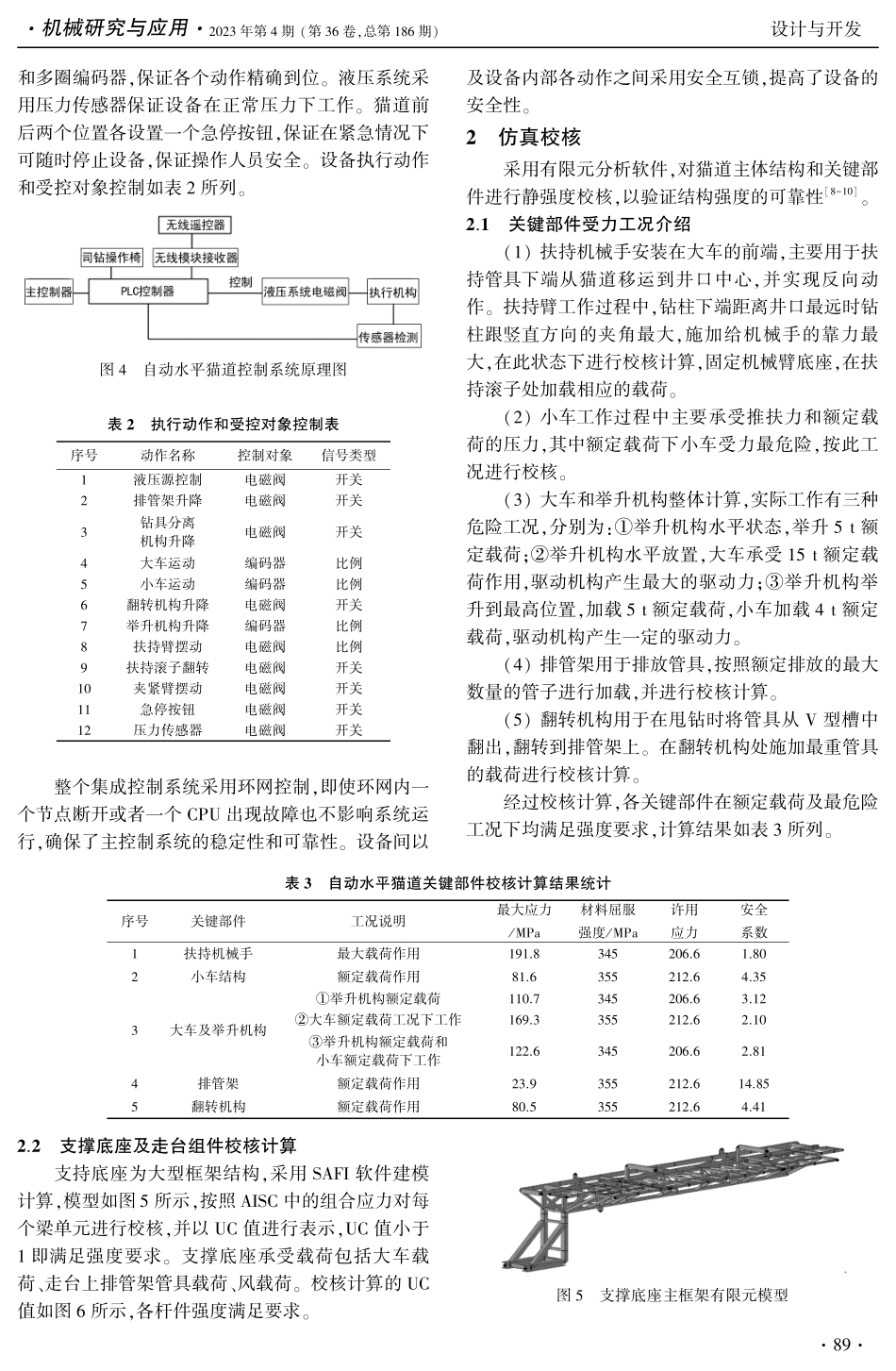
doi:10.16576/j.ISSN.1007-4414.2023.04.025海洋模块钻机用自动水平猫道的研制及应用∗师涛1ꎬ卞勋杰1ꎬ王兵2ꎬ吴忠1ꎬ赵素华3(1.兰州兰石石油装备工程股份有限公司ꎬ甘肃兰州730087ꎻ2.中海石油(中国)有限公司天津分公司工程技术作业中心ꎬ天津300456ꎻ3.中海油能源发展装备技术有限公司加工制造分公司ꎬ天津300452)摘要:为改善海洋模块钻机钻修井作业管具移运工作条件ꎬ降低劳动强度ꎬ提高工作效率ꎬ研制了自动水平猫道ꎮ该猫道采用固定式大容量排管架、水平移动式大车和小车、单臂式扶持机械手等结构ꎬ以及电控液和负载敏感系统ꎬ实现了钻井管具的自动移运ꎻ采用PLC控制、工业环网和集成控制技术ꎬ对设备进行远程控制ꎬ同时设置安全逻辑互锁控制和应急操作功能ꎬ提高了系统的安全性和可靠性ꎻ采用有限元分析软件ꎬ对设备进行校核计算和优化分析ꎬ以确保其满足强度和刚度要求ꎮ现场调试结果表明ꎬ该设备各项动作功能正常ꎬ能够顺利完成管具的水平移运ꎬ并与井口提升设备配合ꎬ实现了管具的水平垂直转换ꎮ该设备技术先进ꎬ自动化程度及效率较高ꎬ能够显著减轻工人的劳动强度ꎬ实现了钻台工作的少人化和无人化ꎮ关键词:模块钻机ꎻ自动水平猫道ꎻ环网控制ꎻ联合试验中图分类号:TE928文献标识码:A文章编号:1007-4414(2023)04-0087-04DevelopmentandApplicationofAutomaticHorizontalCatwalkforOffshoreModularDrillingRigSHITao1ꎬBIANXun-jie1ꎬWANGBing2ꎬWUZhong1ꎬZHAOSu-hua3(1.LanzhouLanshiPetroleumEquipmentEngineeringCo.ꎬLtdꎬLanzhou730087ꎬGansuꎬChinaꎻ2.EngineeringTechnologyOperationCenterꎬTianjinBranchofCNOOC(China)Co.ꎬLtdꎬTianjin300456ꎬChinaꎻ3.ProcessingandManufacturingBranchofCNOOCEnergyDevelopmentEquipmentTechnologyCo.ꎬLtdꎬTianjin300452ꎬChina)Abstract:Anautomaticho...