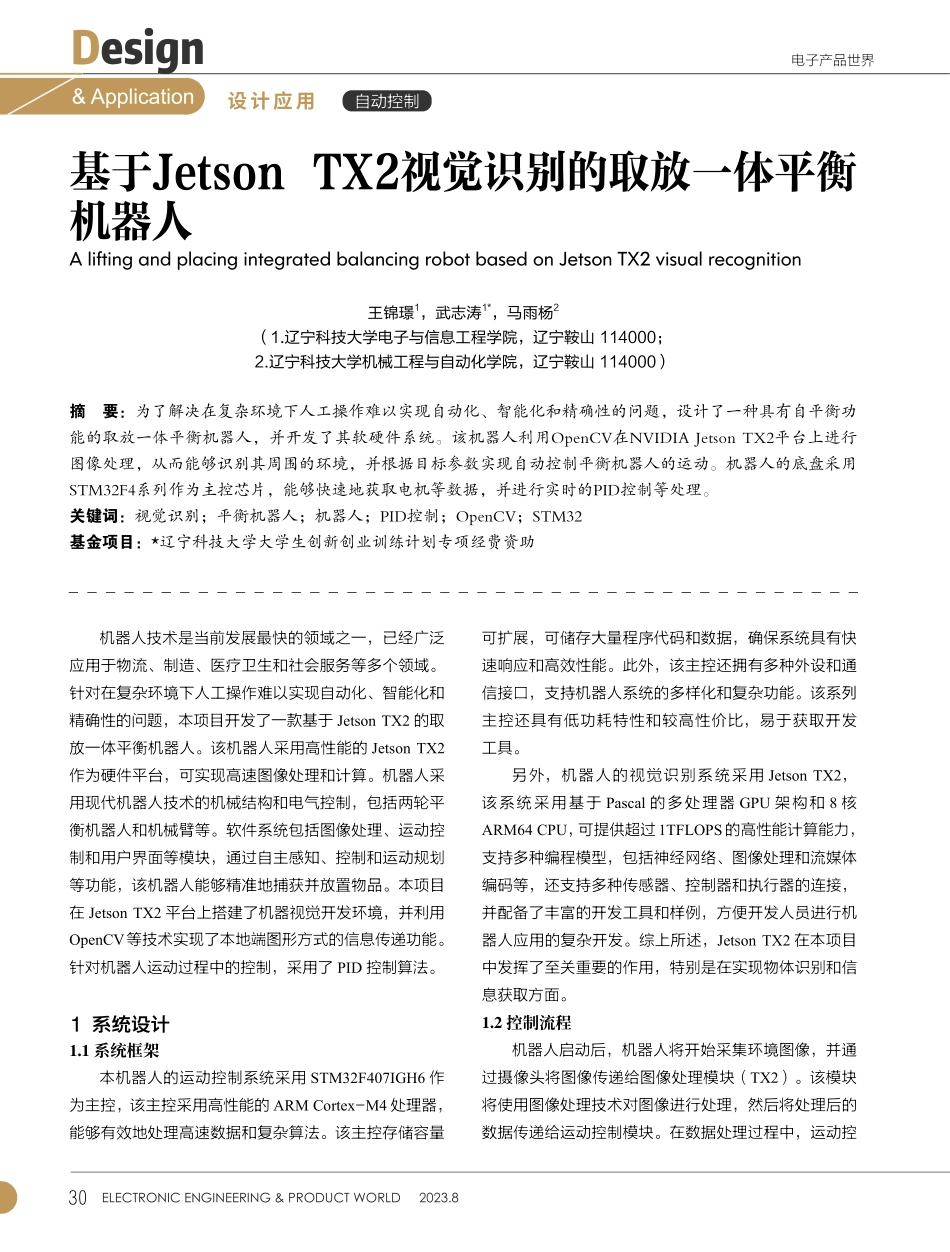
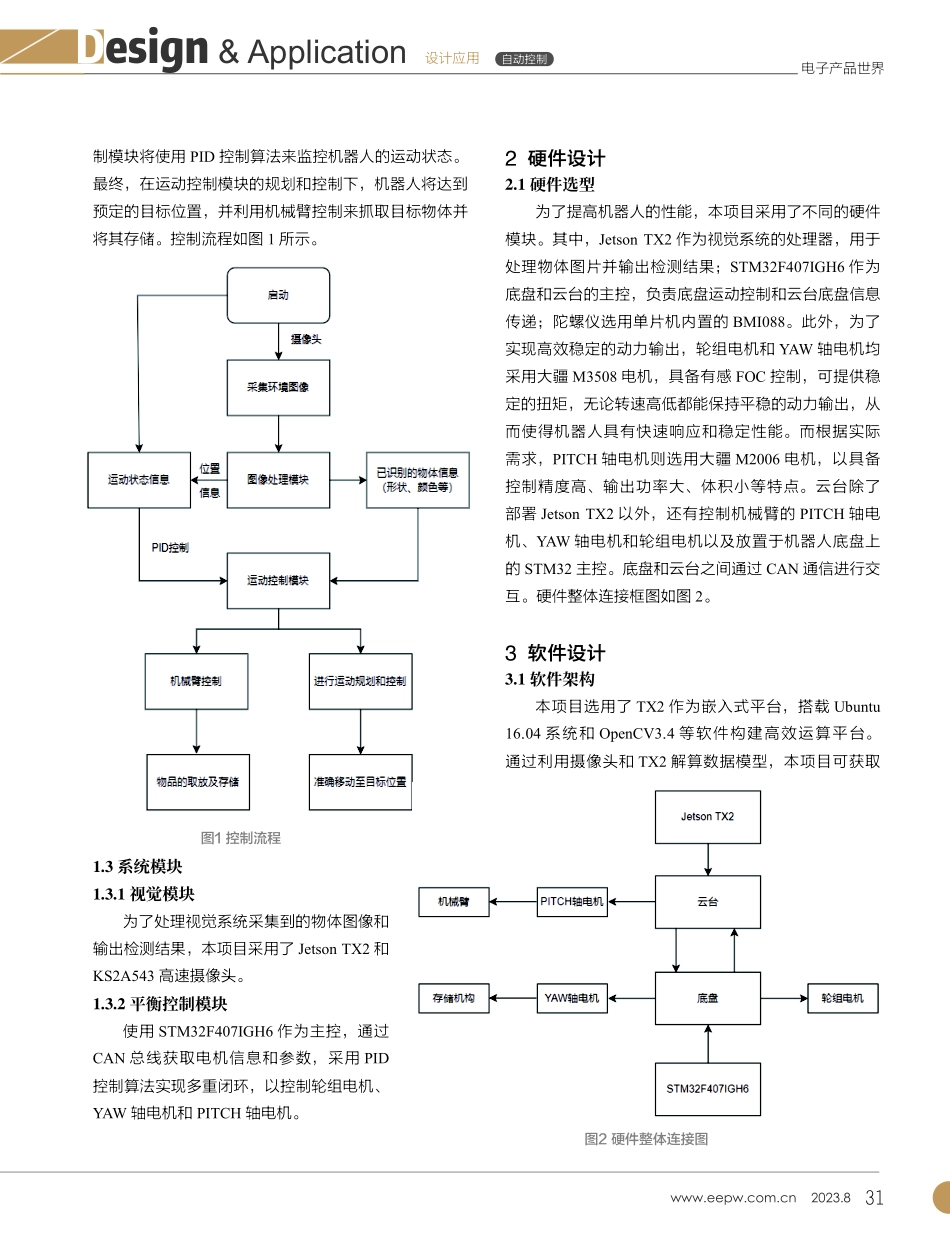
30ELECTRONICENGINEERING&PRODUCTWORLD2023.8�$电子产品世界Design设计应用&Application自动控制基于JetsonTX2视觉识别的取放一体平衡机器人AliftingandplacingintegratedbalancingrobotbasedonJetsonTX2visualrecognition王锦璟1,武志涛1*,马雨杨2(1.辽宁科技大学电子与信息工程学院,辽宁鞍山114000;2.辽宁科技大学机械工程与自动化学院,辽宁鞍山114000)摘要:为了解决在复杂环境下人工操作难以实现自动化、智能化和精确性的问题,设计了一种具有自平衡功能的取放一体平衡机器人,并开发了其软硬件系统。该机器人利用OpenCV在NVIDIAJetsonTX2平台上进行图像处理,从而能够识别其周围的环境,并根据目标参数实现自动控制平衡机器人的运动。机器人的底盘采用STM32F4系列作为主控芯片,能够快速地获取电机等数据,并进行实时的PID控制等处理。关键词:视觉识别;平衡机器人;机器人;PID控制;OpenCV;STM32基金项目:*辽宁科技大学大学生创新创业训练计划专项经费资助机器人技术是当前发展最快的领域之一,已经广泛应用于物流、制造、医疗卫生和社会服务等多个领域。针对在复杂环境下人工操作难以实现自动化、智能化和精确性的问题,本项目开发了一款基于JetsonTX2的取放一体平衡机器人。该机器人采用高性能的JetsonTX2作为硬件平台,可实现高速图像处理和计算。机器人采用现代机器人技术的机械结构和电气控制,包括两轮平衡机器人和机械臂等。软件系统包括图像处理、运动控制和用户界面等模块,通过自主感知、控制和运动规划等功能,该机器人能够精准地捕获并放置物品。本项目在JetsonTX2平台上搭建了机器视觉开发环境,并利用OpenCV等技术实现了本地端图形方式的信息传递功能。针对机器人运动过程中的控制,采用了PID控制算法。1系统设计1.1系统框架本机器人的运动控制系统采用STM32F407IGH6作为主控,该主控采用高性能的ARMCortex-M4处理器,能够有效地处理高速数据和复杂算法。该主控存储容量可扩展,可储存大量程序代码和数据,确保系统具有快速响应和高效性能。此外,该主控还拥有多种外设和通信接口,支持机器人系统的多样化和复杂功能。该系列主控还具有低功耗特性和较高性价比,易于获取开发工具。另外,机器人的视觉识别系统采用JetsonTX2,该系统采用基于Pascal的多处理器GPU架构和8核ARM64CPU,可提供超过1TFLOPS的高性能计算能力,支持多种编程模型,包括神经网络、图像处理和流媒体编码等,还支持多种传感器、控制器和执行器...