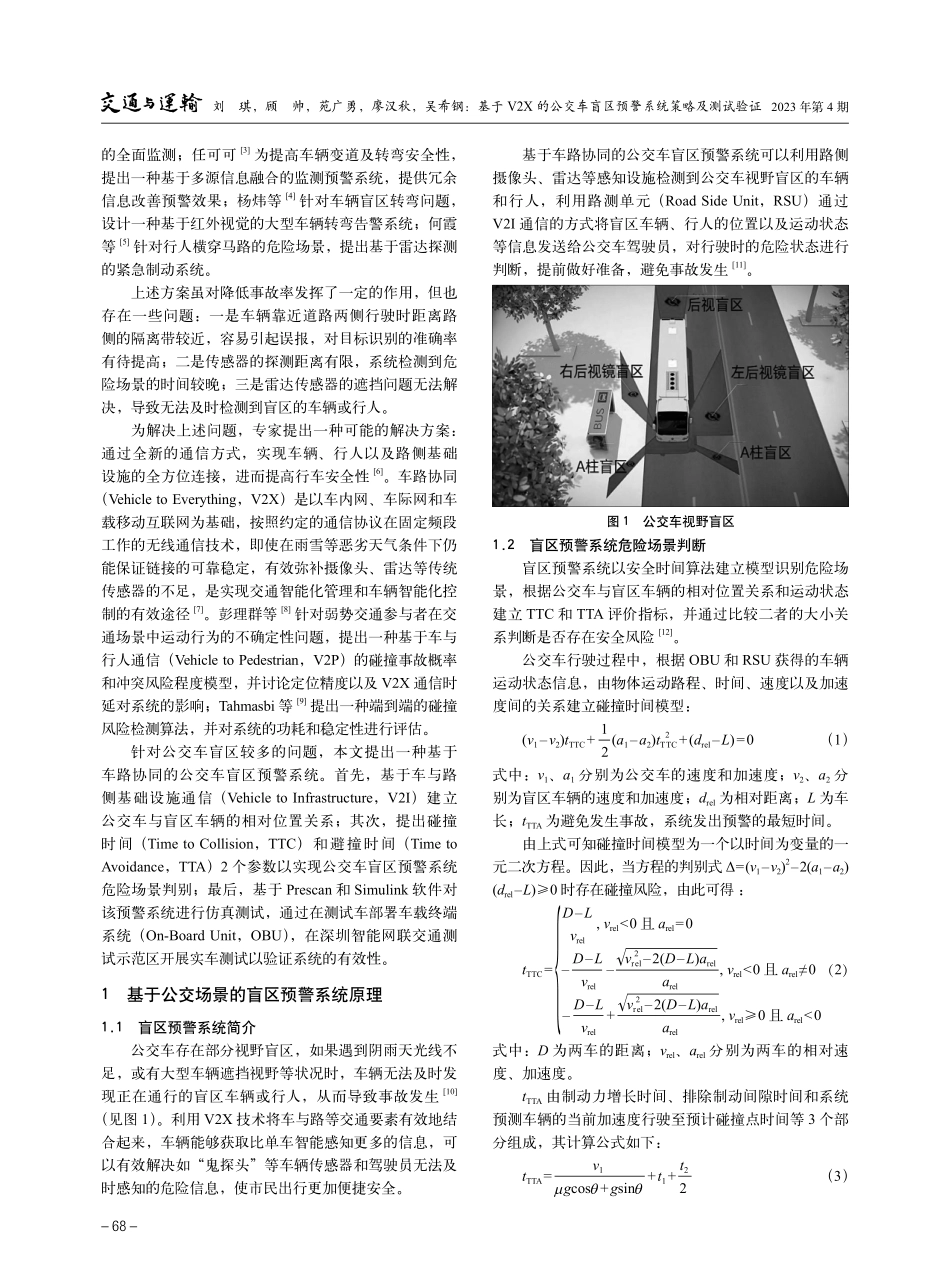
–67–TRAFFIC&TRANSPORTATION2023年7月第39卷第4期(总第228期)Jul.2023,Volume39No.4(SerialNo.228)收稿日期:2023-03-30第一作者简介:刘琪(1982-),男,汉族,湖北洪湖人,学士,工程师,主要研究方向:交通信息工程与控制、车联网。基于V2X的公交车盲区预警系统策略及测试验证刘琪1,顾帅2,3,苑广勇1,廖汉秋3,吴希钢1,2(1.深圳市智慧城市通信有限公司,深圳518000;2.武汉理工大学,武汉430000;3.深圳巴士集团股份有限公司,深圳518000)摘要:为解决城市公交车运行过程中容易出现因视野盲区导致的交通事故问题,提出一种基于车路协同的盲区预警策略。首先,利用高斯克吕格投影建立公交车与盲区车辆的位置关系模型,通过车与路侧基础设施通信(V2I)获取盲区车辆或行人的相关信息;其次,基于碰撞时间(TTC)和避撞时间(TTA)2个评价指标建立预警算法;最后,基于Prescan和Simulink软件搭建测试模型并进行联合仿真,并依托深圳市坪山区智能网联测试示范区建立公交车盲区预警系统进行道路测试。结果表明,相较于传统单车感知,盲区预警策略在高速行驶场景下能够提前2.4s检测到碰撞风险;在低速行驶场景下能够提前1.6s检测到碰撞风险,系统运行稳定。关键词:车路协同;盲区预警系统;碰撞时间;避撞时间中图分类号:U491文献标志码:A文章编号:1671-3400(2023)04-0067-05StrategyandSimulationVerificationofBusBlindSpotWarningSystemBasedonV2XLIUQi1,GUShuai2,3,YUANGuangyong1,LIAOHanqiu3,WUXigang1,2(1.ShenzhenSmartCityCommunicationCo.,Ltd,Shenzhen518000,China;2.WuhanUniversityofTechnology,Wuhan430000,China;3.ShenzhenBusCo.,Ltd,Shenzhen518000,China)Abstract:Inordertosolvetheproblemthattrafficaccidentscausedbyblindspotsintheoperationofurbanbusesarepronetooccur,ablindspotwarningstrategybasedonvehicle-roadcoordinationisproposed.Firstly,theGauskrügprojectionisusedtoestablishthepositionrelationshipmodelbetweenbusesandvehiclesintheblindspot,andtherelevantinformationofvehiclesorpedestriansintheblindareaisobtainedthroughV2I(VehicletoInfrastructure)vehicle-roadcommunication.Secondly,anearlywarningalgorithmisestablishedbasedontwoevaluationindicators:TimetoCollision(TTC)andTimetoAvoidance(TTA).Finally,basedonPrescanandSimulinksoftware,thetestmodelisbuiltandco-simu...