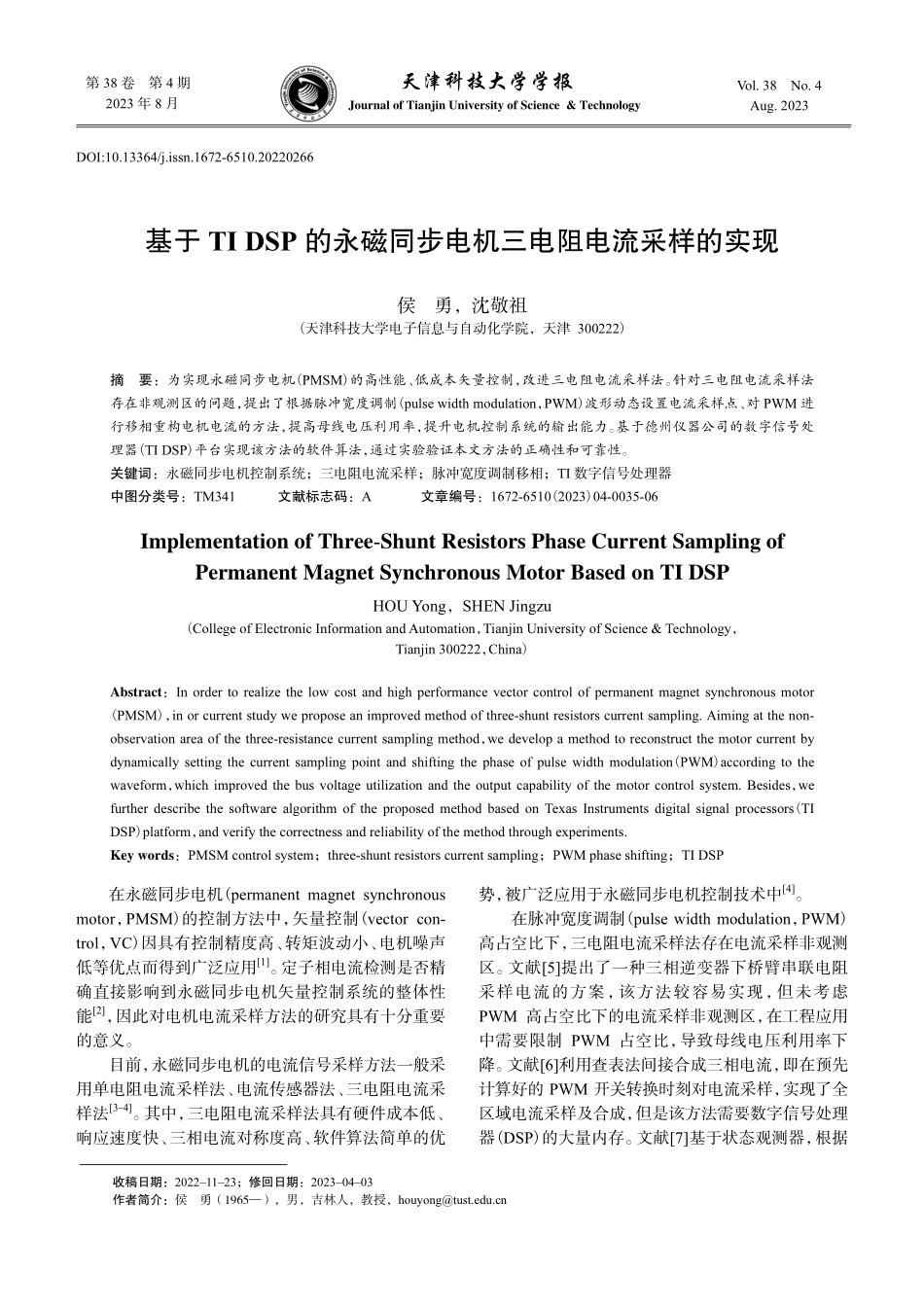
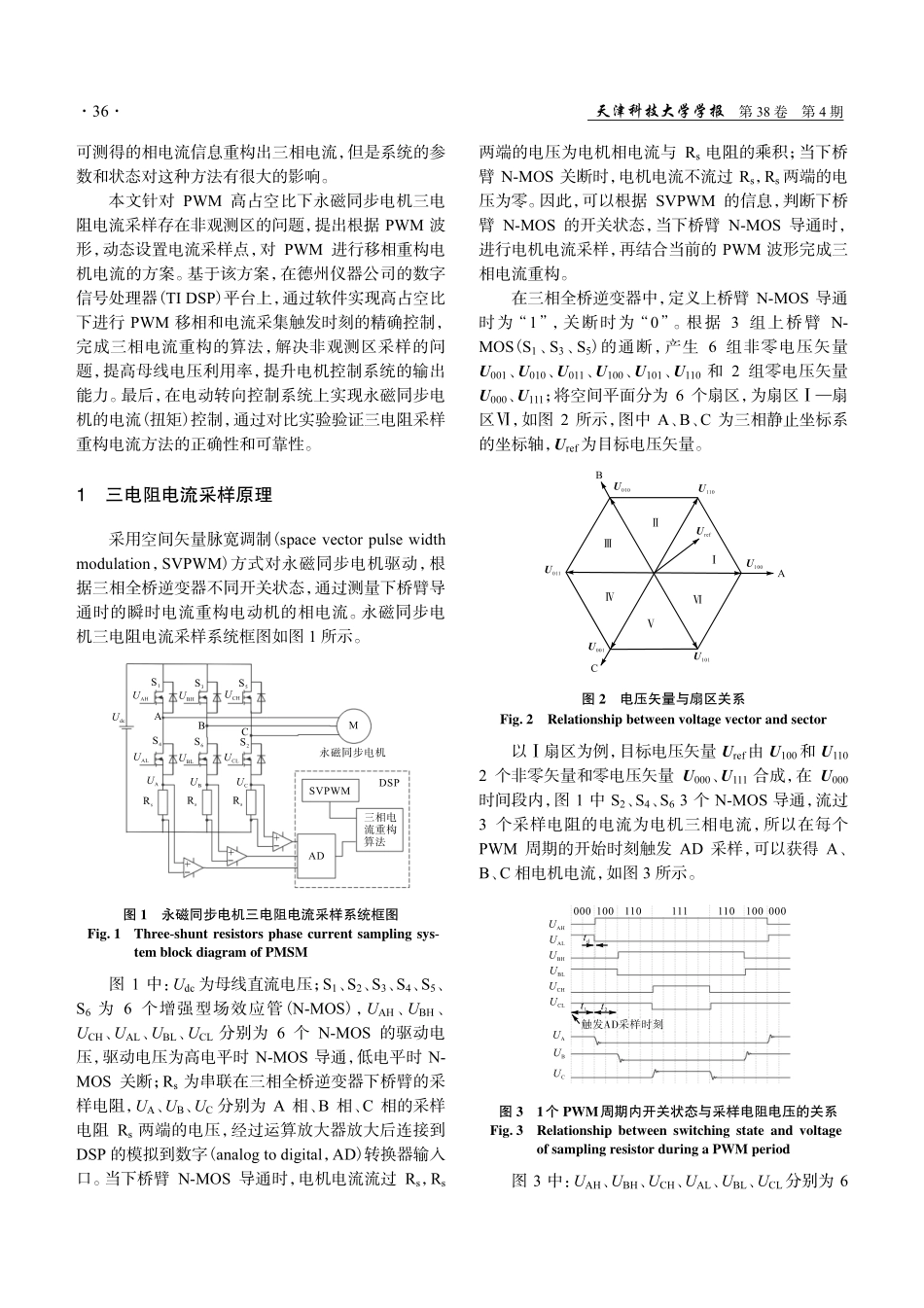
第38卷第4期2023年8月天津科技大学学报JournalofTianjinUniversityofScience&TechnologyVol.38No.4Aug.2023收稿日期:2022–11–23;修回日期:2023–04–03作者简介:侯勇(1965—),男,吉林人,教授,houyong@tust.edu.cn基于TIDSP的永磁同步电机三电阻电流采样的实现侯勇,沈敬祖(天津科技大学电子信息与自动化学院,天津300222)摘要:为实现永磁同步电机(PMSM)的高性能、低成本矢量控制,改进三电阻电流采样法。针对三电阻电流采样法存在非观测区的问题,提出了根据脉冲宽度调制(pulsewidthmodulation,PWM)波形动态设置电流采样点、对PWM进行移相重构电机电流的方法,提高母线电压利用率,提升电机控制系统的输出能力。基于德州仪器公司的数字信号处理器(TIDSP)平台实现该方法的软件算法,通过实验验证本文方法的正确性和可靠性。关键词:永磁同步电机控制系统;三电阻电流采样;脉冲宽度调制移相;TI数字信号处理器中图分类号:TM341文献标志码:A文章编号:1672-6510(2023)04-0035-06ImplementationofThree-ShuntResistorsPhaseCurrentSamplingofPermanentMagnetSynchronousMotorBasedonTIDSPHOUYong,SHENJingzu(CollegeofElectronicInformationandAutomation,TianjinUniversityofScience&Technology,Tianjin300222,China)Abstract:Inordertorealizethelowcostandhighperformancevectorcontrolofpermanentmagnetsynchronousmotor(PMSM),inorcurrentstudyweproposeanimprovedmethodofthree-shuntresistorscurrentsampling.Aimingatthenon-observationareaofthethree-resistancecurrentsamplingmethod,wedevelopamethodtoreconstructthemotorcurrentbydynamicallysettingthecurrentsamplingpointandshiftingthephaseofpulsewidthmodulation(PWM)accordingtothewaveform,whichimprovedthebusvoltageutilizationandtheoutputcapabilityofthemotorcontrolsystem.Besides,wefurtherdescribethesoftwarealgorithmoftheproposedmethodbasedonTexasInstrumentsdigitalsignalprocessors(TIDSP)platform,andverifythecorrectnessandreliabilityofthemethodthroughexperiments.Keywords:PMSMcontrolsystem;three-shuntresistorscurrentsampling;PWMphaseshifting;TIDSP在永磁同步电机(permanentmagnetsynchronousmotor,PMSM)的控制方法中,矢量控制(vectorcon-trol,VC)因具有控制精度高、转矩波动小、电机噪声低等优点而得到广泛应用[...