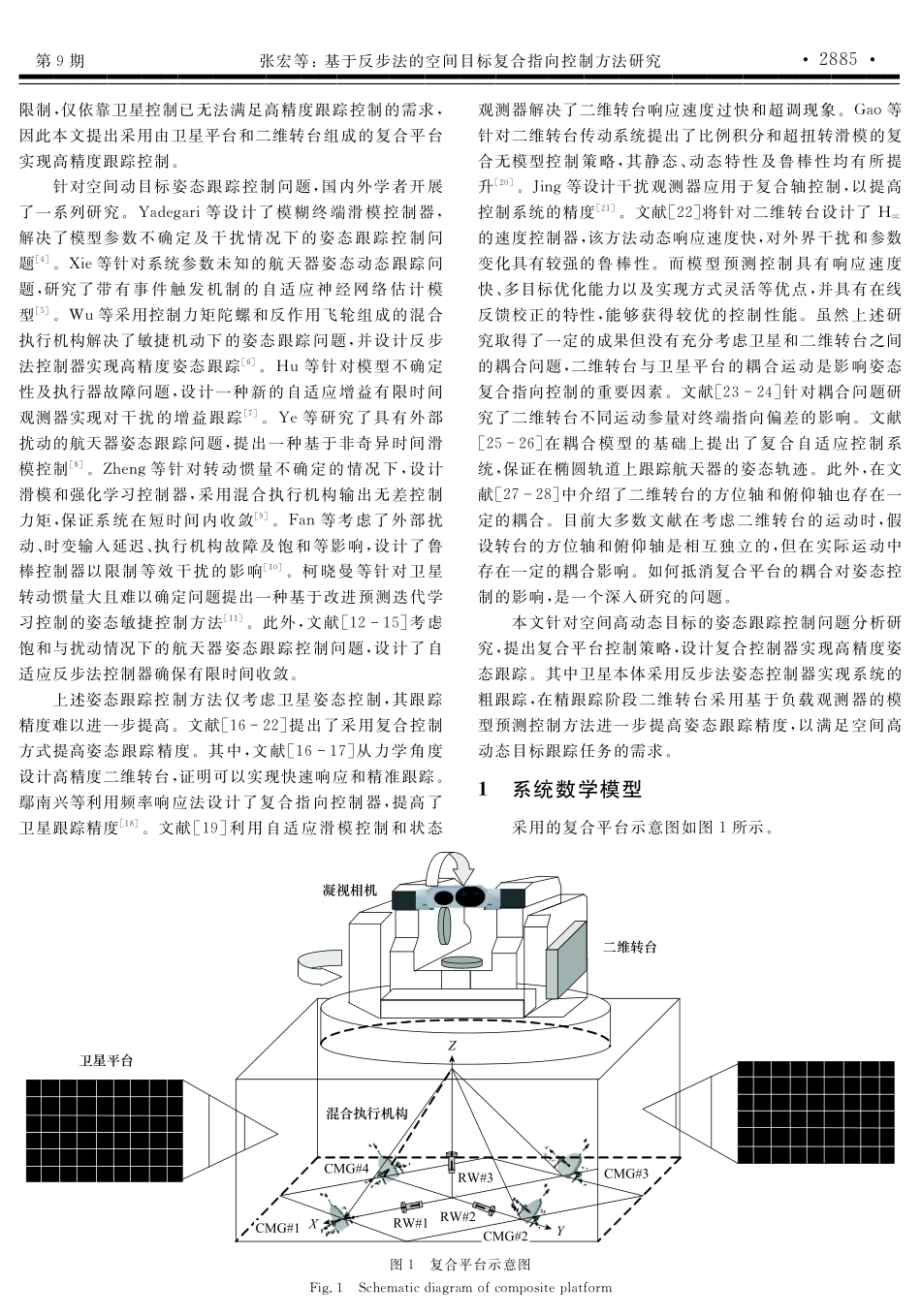
第45卷第9期2023年9月系统工程与电子技术SystemsEngineeringandElectronicsVol.45No.9September2023文章编号:1001506X(2023)09288410网址:www.sysele.com收稿日期:20221104;修回日期:20221201;网络优先出版日期:20221227。网络优先出版地址:http:∥kns.cnki.net/kcms/detail/11.2422.TN.20221227.2136.016.html基金项目:国家自然科学基金(61973153);青蓝工程资助课题通讯作者.引用格式:张宏,吴云华,钟胜钧,等.基于反步法的空间目标复合指向控制方法研究[J].系统工程与电子技术,2023,45(9):28842893.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:ZHANGH,WUYH,ZHONGSJ,etal.Spacetargetcompoundpointingcontrolmethodbasedonbackstepping[J].SystemsEngineeringandElectronics,2023,45(9):28842893.基于反步法的空间目标复合指向控制方法研究张宏1,吴云华1,,钟胜钧1,郭海波2(1.南京航空航天大学航天学院,江苏南京211106;2.上海宇航系统工程研究所,上海201108)摘要:针对空间动目标高精度姿态跟踪控制问题,提出一种由卫星和二维转台组成的复合平台姿态高精度控制方法。首先建立复合平台耦合动力学模型,其次针对卫星本体设计反步法控制器实现粗跟踪。当姿态误差满足一定的切换要求时,粗跟踪误差作为二维转台的目标输入,二维转台采用基于负载观测器的模型预测方法辅助卫星本体进行姿态精跟踪控制,从而实现复合平台的高精度姿态控制。此外,设计了非线性干扰观测器,用来估计耦合运动对卫星本体产生的干扰力矩。数值仿真结果表明,所提出的复合平台姿态控制精度可以提高一个数量级,可以实现高精度姿态跟踪控制,为航天工程实践提供一定的理论基础。关键词:空间动目标;动态跟踪;复合平台;耦合动力学;模型预测控制中图分类号:V448.22+2文献标志码:A犇犗犐:10.12305/j....