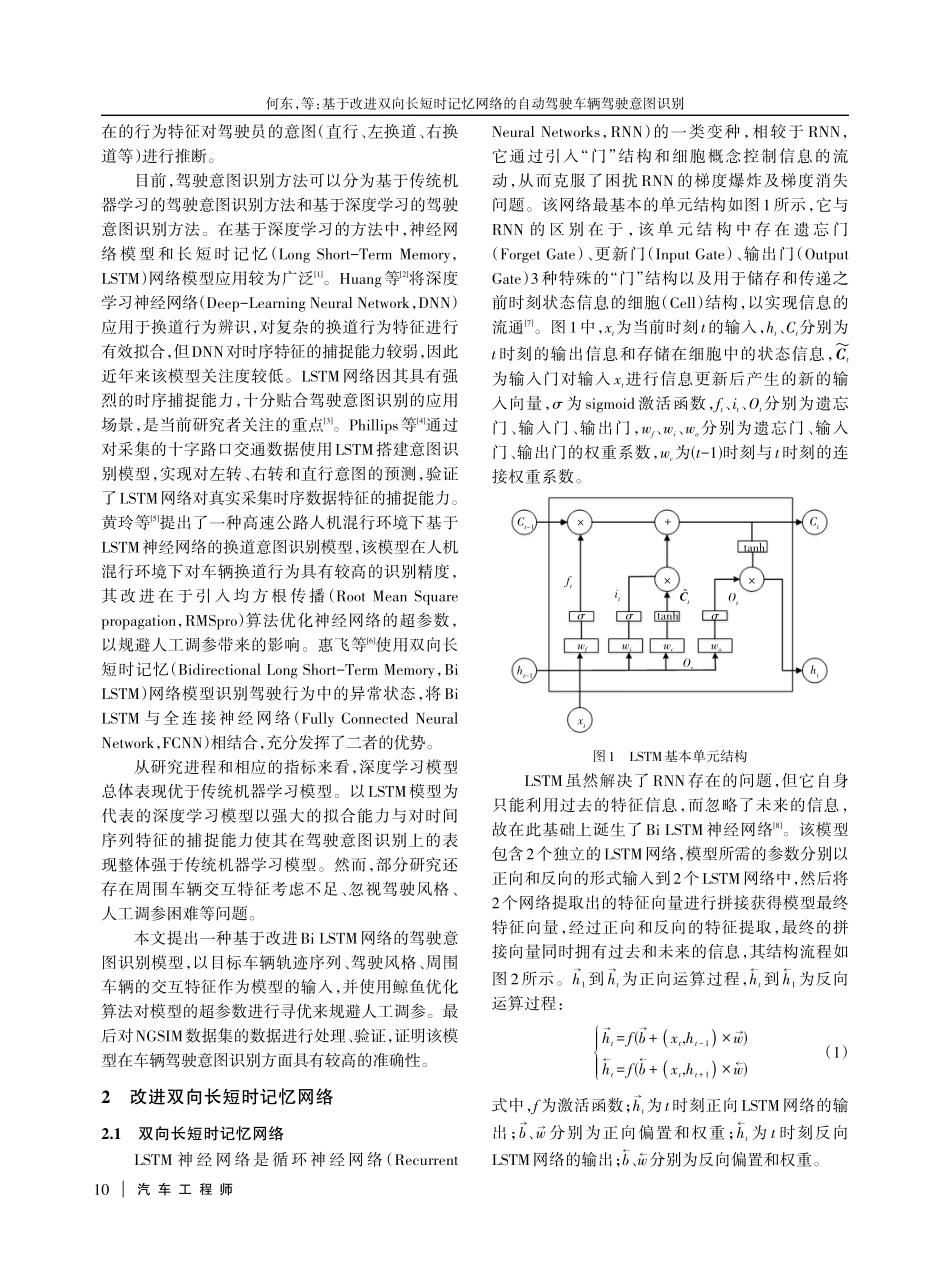
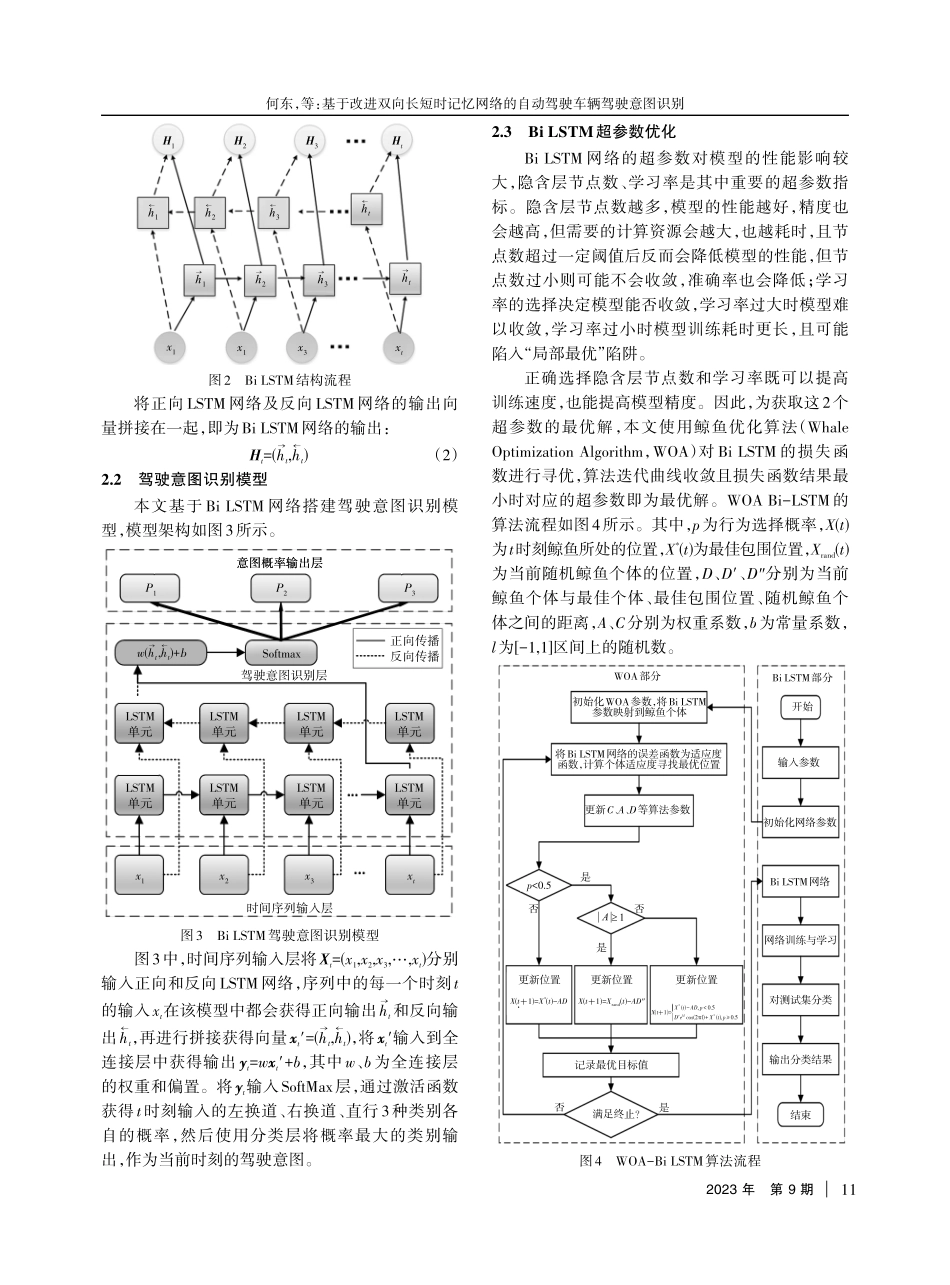
2023年第9期汽车工程师·AutomotiveEngineer【摘要】针对高速混行多车交互环境下车辆驾驶意图识别模型大多忽视驾驶风格和车-车交互信息等问题,提出一种基于改进双向长短时记忆(BiLSTM)网络的驾驶意图识别模型,以目标车辆轨迹序列、驾驶风格、周围车辆的交互特征作为模型的输入进行训练学习,实现对考虑驾驶风格的驾驶意图特征数据集的分类识别,同时使用鲸鱼优化算法对隐含层节点数和学习率等超参数进行寻优,以规避人工调参的负面影响。最后,使用NGSIM数据集对该模型的有效性进行验证,结果表明,模型的识别准确率达到97.5%,证明其在识别车辆驾驶意图方面具有较高的准确性。关键词:自动驾驶多车交互驾驶意图识别改进双向长短时记忆网络鲸鱼优化算法中图分类号:U461.91文献标志码:ADOI:10.20104/j.cnki.1674-6546.20230315VehicleDrivingIntentRecognitionBasedonEnhancedBidirectionalLongShort-TermMemoryNetworkHeDong,ZhaoMaojie,WangZinan(ChongqingJiaotongUniversity,Chongqing400074)【Abstract】Inthecontextofhigh-speedmixedtrafficandintricatemulti-vehicleinteraction,existingdrivingintentionrecognitionmodelsforresearchvehiclesmostlyneglectdrivingstylesandvehicle-vehicleinformationinteraction,thispaperintroducedanoveldrivingintentionrecognitionmodelbasedonanenhancedBidirectionalLongShort-TermMemory(BiLSTM)network,withthedrivingtrajectorysequenceofthetargetvehicle,drivingstyle,andinteractionfeaturesofsurroundingvehiclesasinputsforeffectivetrainingandlearning,tofacilitatetheclassificationandrecognitionofthedrivingintentionfeaturedataset,specificallyconsideringdiversedrivingstyles.Additionally,theWhaleOptimizationAlgorithm(WOA)wasemployedtooptimizehyperparameters,encompassingthenumberofhiddenlayernodesandlearningrate,effectivelymitigatingtheadverseimpactsofmanualparameteradjustment.Themodel’sefficacywasvalidatedusingtheNGSIMdataset,exhibitinganimpressiverecognitionaccuracyof97.5%inpreciselyidentifyingvehicledrivingintentions.Keywords:Autonomousdriving,Multi-vehicleinteraction,Drivingintentionrecognition,BidirectionalLongShort-TermMemory(BiLSTM)network,WhaleOptimizationAlgorithm(WOA)【引用格式】何东,赵茂杰,王梓楠.基于改进双...