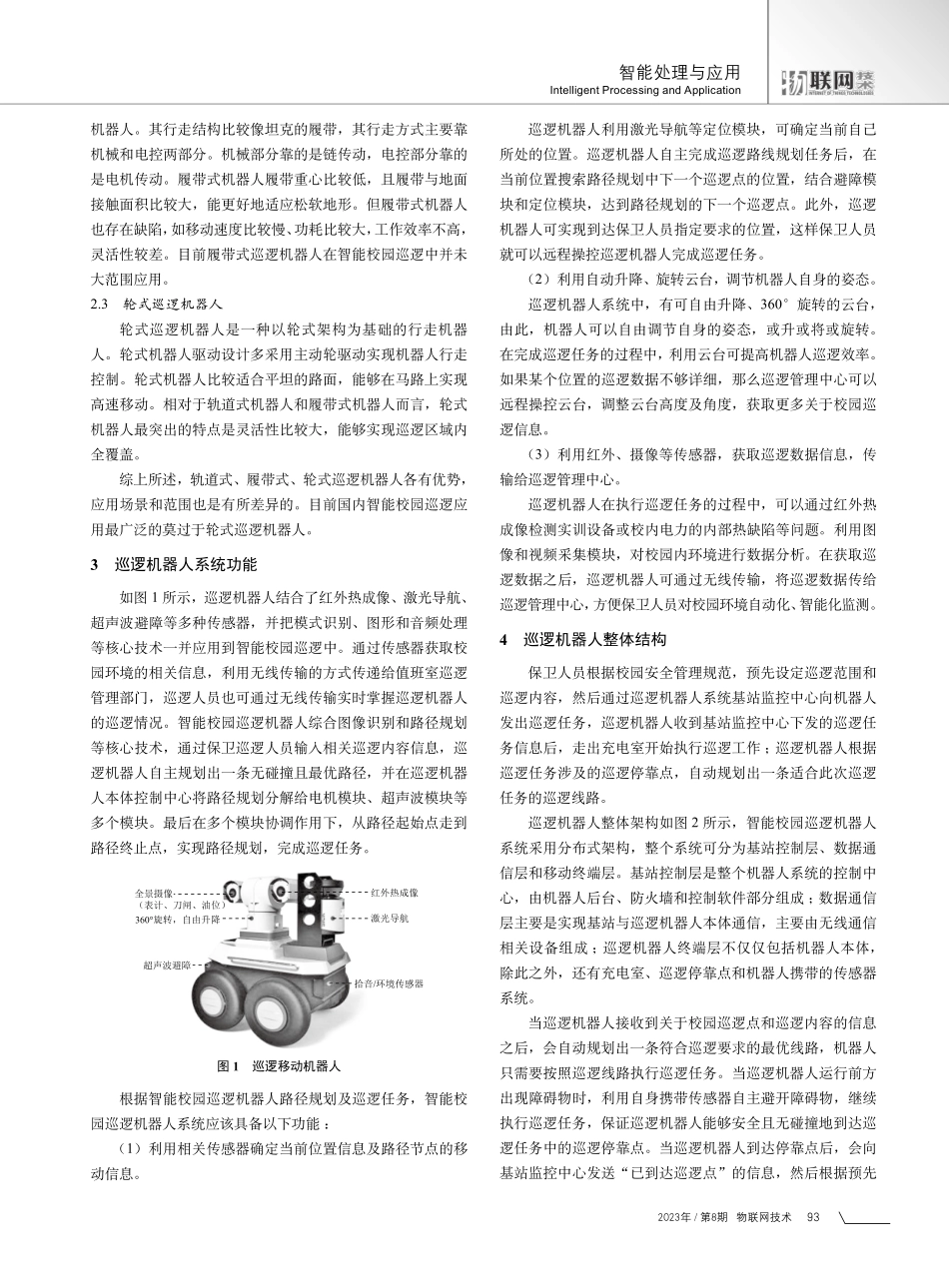
物联网技术2023年/第8期智能处理与应用IntelligentProcessingandApplication920引言近些年来,校园欺凌广泛出现在各大媒体报纸上,是校园建设的一大难题。因学校保卫人员有限,校园巡逻有时候并不能做到无死角全覆盖,为校园安全埋下了隐患。智能化校园建设,仅凭保卫人员轮班巡逻已无法满足需求。近年来,人工智能巡逻技术迅速发展,采用智能校园巡逻机器人代替或辅助人工完成巡逻,已不再遥不可及,自动化、智能化的智能巡逻机器人,未来必将成为智能校园建设的一大亮点。1巡逻机器人技术智能校园巡逻机器人利用自身携带的传感器巡查校园情况,将巡查结果发送给保卫处值班人员,如遇到校园异常或突发情况及时报警并将情况上报值班室。无论严寒还是酷暑,多么恶劣的环境巡逻机器人都能忍受,巡逻机器人都能坚守在维护校园祥和的岗位上,由此降低了巡逻保卫人员的劳动强度,增加了校园巡逻检查的可靠性,全覆盖、无死角、实时监控校园状态,实现了校园安全管理的自动化和智能化管理。智能校园巡逻项目主要是观测和记录数据,但是由于校园内建筑分布比较广泛,比较适合采用智能化巡逻方式替代或者辅助保卫人员完成巡逻工作,因此集聚自动化与智能化于一体的智能校园巡逻机器人也就应运而生。智能巡逻机器人综合了红外检测装置、摄像装置、音频装置等多种传感器,整合了导航定位、图像处理、路径规划、无线传输等多种前沿智能技术,使巡逻机器人可以通过自身传感器获得的检测数据对校园内的电力设备、教学楼和宿舍楼安全环境等进行数据分析,根据数据分析结果判断电力设备是否存在电气、教学楼和宿舍楼外是否有异常情况等影响校园安全的隐患因素。如果分析结果存在异常情况,那么巡逻机器人可通过无线传输立即将相关数据传递给值班室巡逻管理中心的保卫人员。智能校园巡逻机器人使用灵活方便,对环境条件并不敏感,不仅校园巡逻提高了工作质量,而且降低了保卫人员成本,对未来提升校园安全具有重大意义。2巡逻机器人行走方式目前巡逻机器人行走方式主要分为轨道式、履带式和轮式三种。这三种巡逻机器人,因为各自行走方式不同,应用的场景也是有区别的。2.1轨道式巡逻机器人轨道式巡逻机器人是一种依赖于室外铺设轨道的行走机器人。其行走方式采用轨道式移动结构,机器人本体利用滑线取电方式获取动力,利用电力载波通信技术实现图像及控制指令传输。轨道式巡逻机器人具有定位精确、运行速度快、成本低、24小时连续运行等优点;但只能完成在轨道活动...