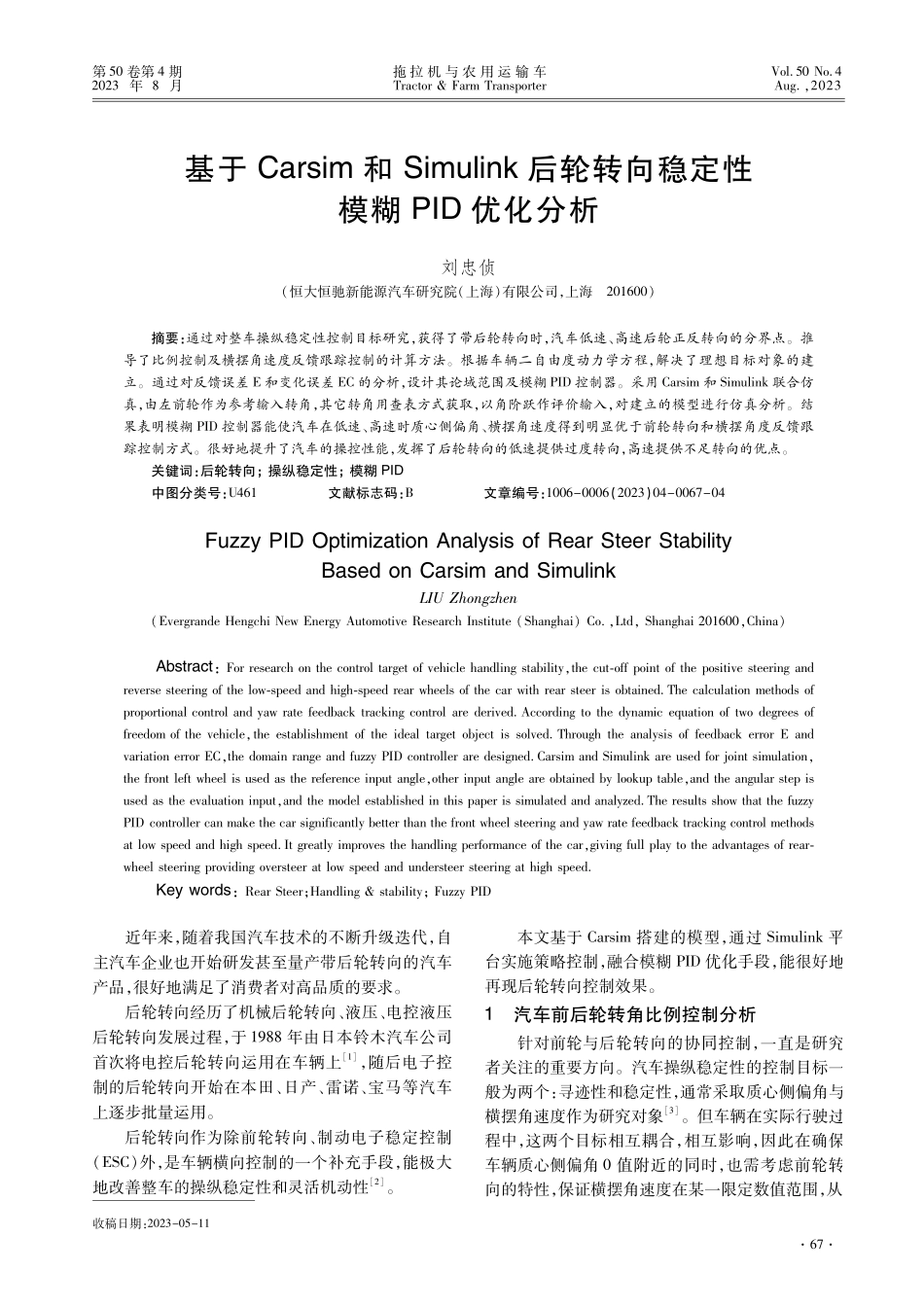
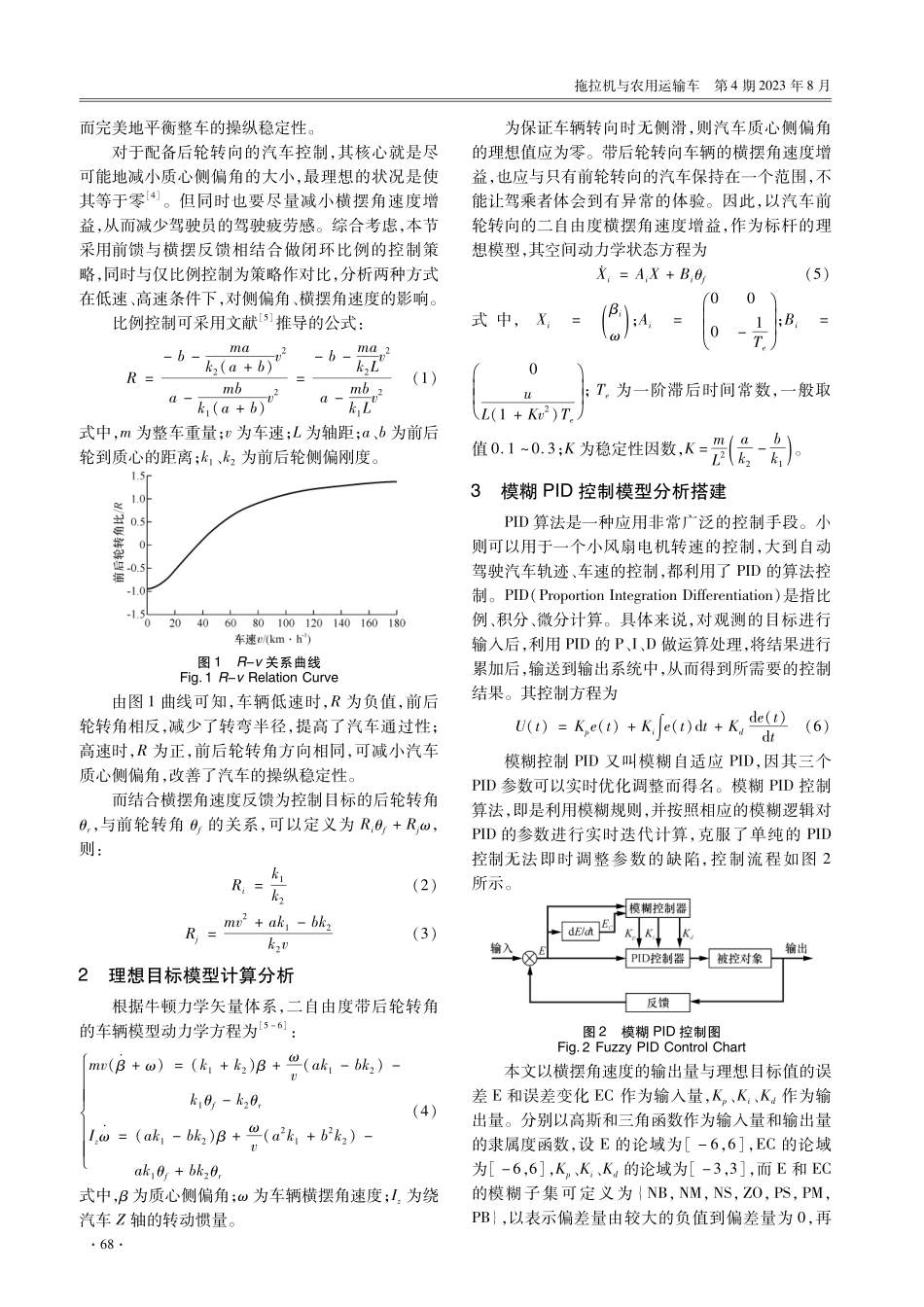
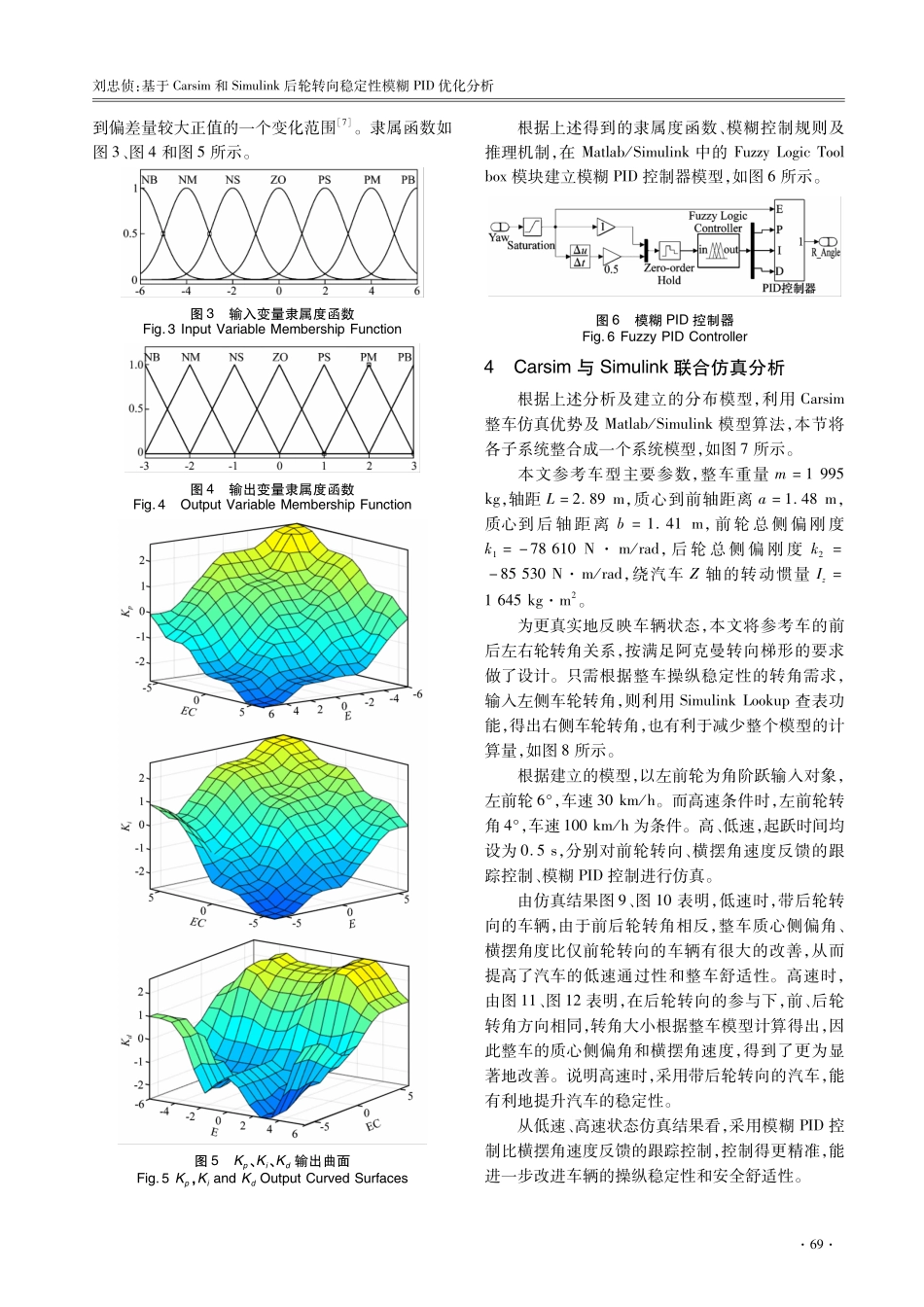
基于Carsim和Simulink后轮转向稳定性模糊PID优化分析刘忠侦(恒大恒驰新能源汽车研究院(上海)有限公司,上海201600)摘要:通过对整车操纵稳定性控制目标研究,获得了带后轮转向时,汽车低速、高速后轮正反转向的分界点。推导了比例控制及横摆角速度反馈跟踪控制的计算方法。根据车辆二自由度动力学方程,解决了理想目标对象的建立。通过对反馈误差E和变化误差EC的分析,设计其论域范围及模糊PID控制器。采用Carsim和Simulink联合仿真,由左前轮作为参考输入转角,其它转角用查表方式获取,以角阶跃作评价输入,对建立的模型进行仿真分析。结果表明模糊PID控制器能使汽车在低速、高速时质心侧偏角、横摆角速度得到明显优于前轮转向和横摆角度反馈跟踪控制方式。很好地提升了汽车的操控性能,发挥了后轮转向的低速提供过度转向,高速提供不足转向的优点。关键词:后轮转向;操纵稳定性;模糊PID中图分类号:U461文献标志码:B文章编号:1006-0006(2023)04-0067-04FuzzyPIDOptimizationAnalysisofRearSteerStabilityBasedonCarsimandSimulinkLIUZhongzhen(EvergrandeHengchiNewEnergyAutomotiveResearchInstitute(Shanghai)Co.,Ltd,Shanghai201600,China)Abstract:Forresearchonthecontroltargetofvehiclehandlingstability,thecutoffpointofthepositivesteeringandreversesteeringofthelowspeedandhighspeedrearwheelsofthecarwithrearsteerisobtained.Thecalculationmethodsofproportionalcontrolandyawratefeedbacktrackingcontrolarederived.Accordingtothedynamicequationoftwodegreesoffreedomofthevehicle,theestablishmentoftheidealtargetobjectissol...