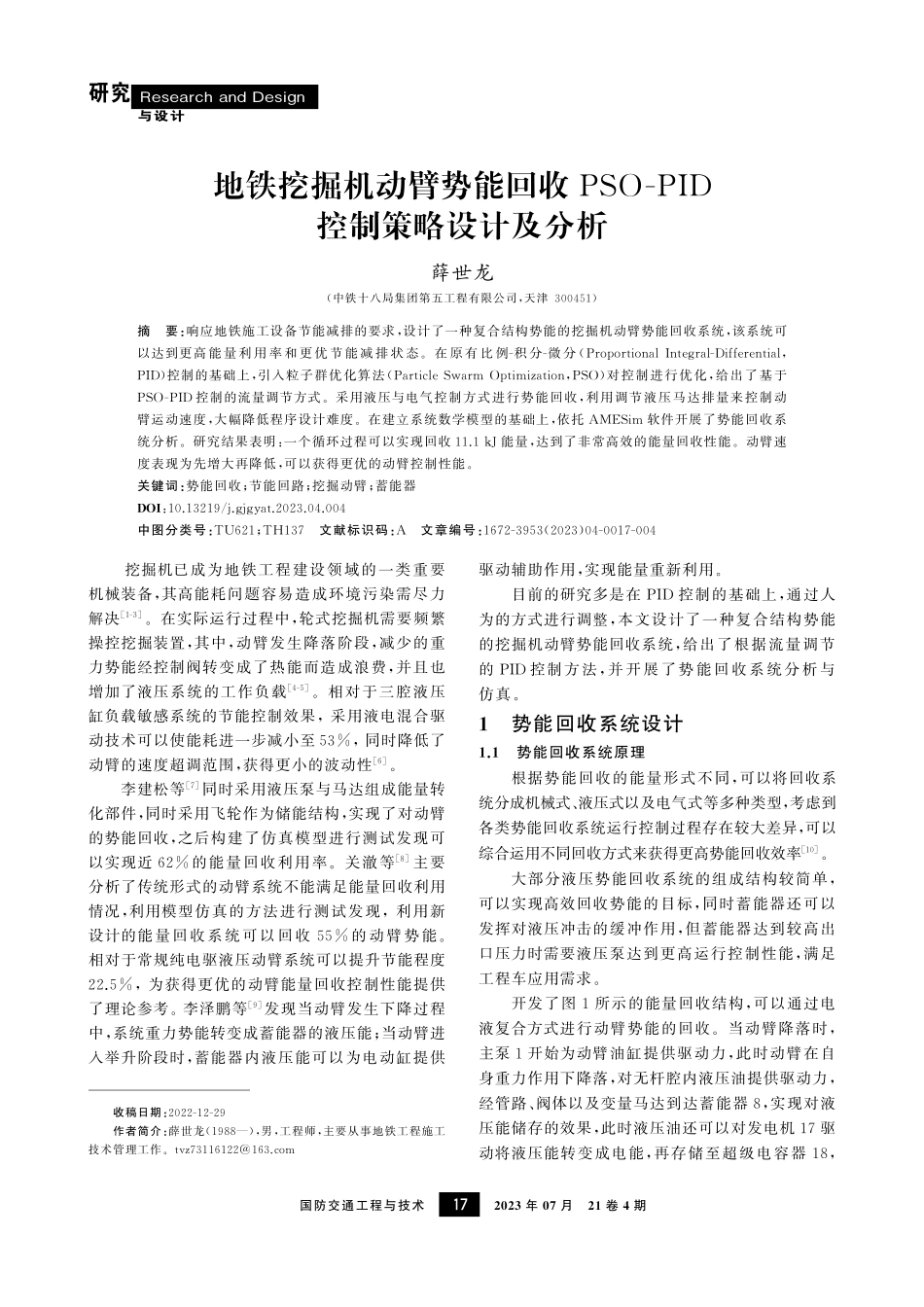
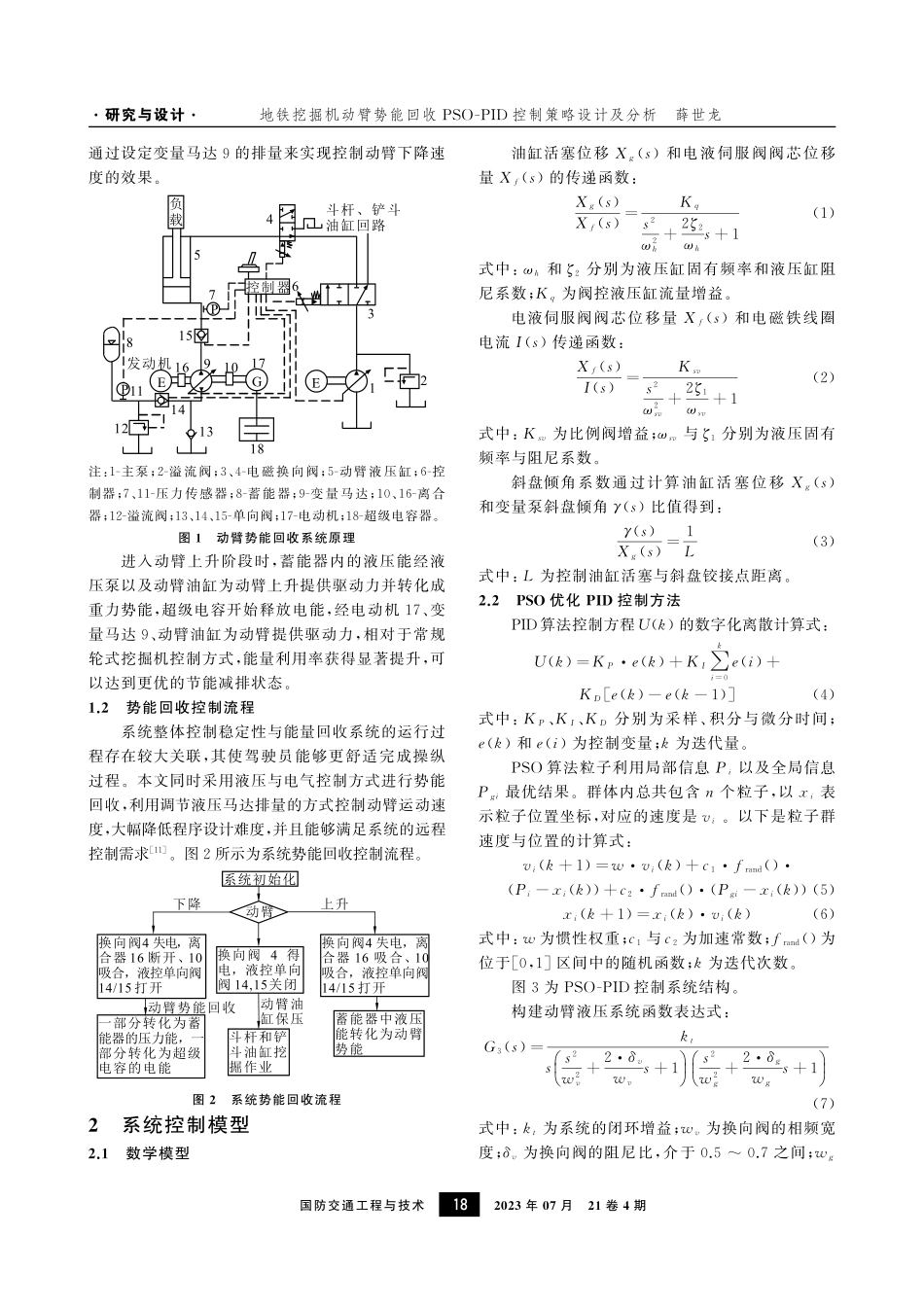
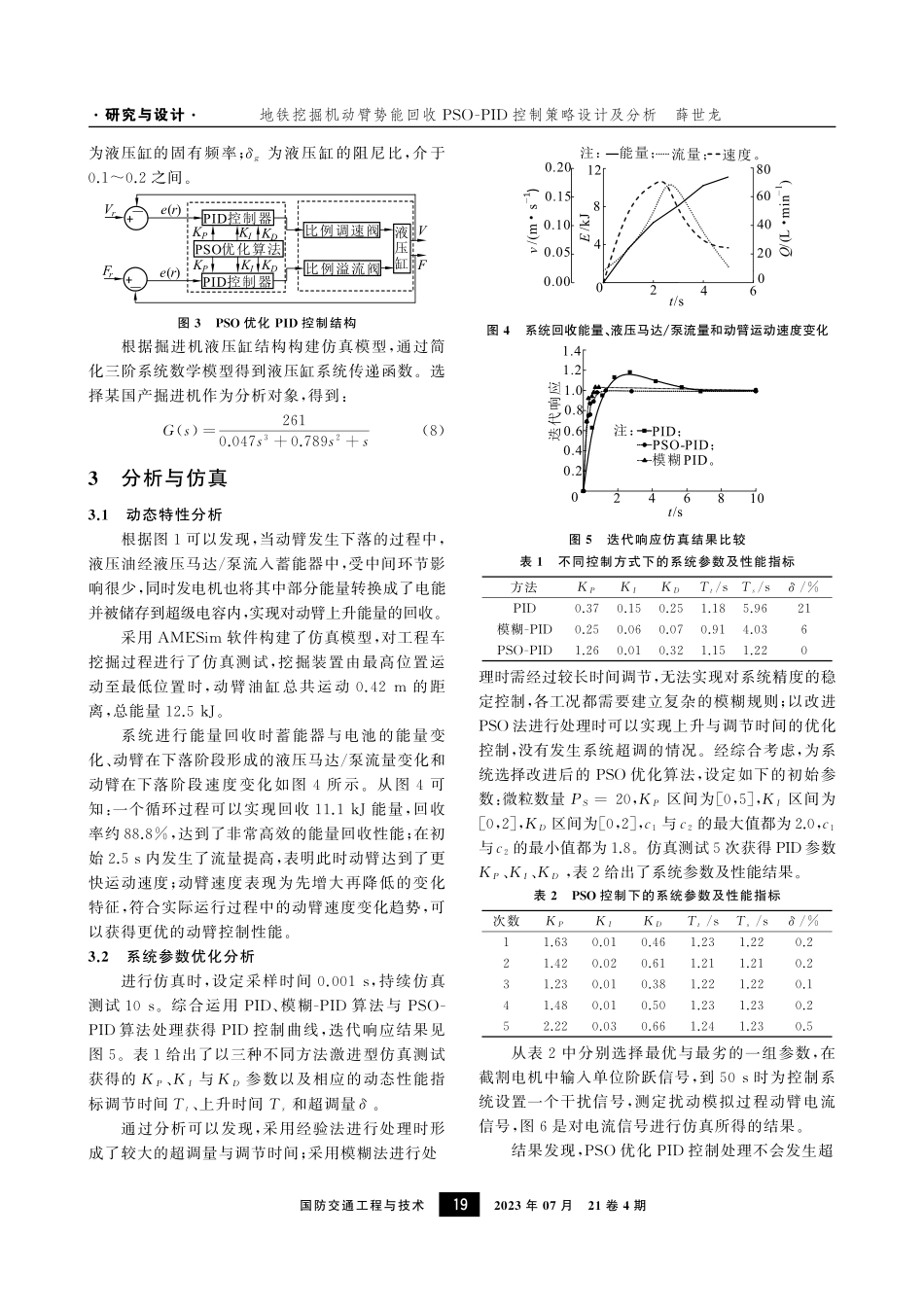
国防交通工程与技术2023年07月21卷4期收稿日期:2022G12G29作者简介:薛世龙(1988—),男,工程师,主要从事地铁工程施工技术管理工作.tvz73116122@163.com地铁挖掘机动臂势能回收PSOGPID控制策略设计及分析薛世龙(中铁十八局集团第五工程有限公司,天津300451)摘要:响应地铁施工设备节能减排的要求,设计了一种复合结构势能的挖掘机动臂势能回收系统,该系统可以达到更高能量利用率和更优节能减排状态.在原有比例G积分G微分(ProportionalIntegralGDifferential,PID)控制的基础上,引入粒子群优化算法(ParticleSwarmOptimization,PSO)对控制进行优化,给出了基于PSOGPID控制的流量调节方式.采用液压与电气控制方式进行势能回收,利用调节液压马达排量来控制动臂运动速度,大幅降低程序设计难度.在建立系统数学模型的基础上,依托AMESim软件开展了势能回收系统分析.研究结果表明:一个循环过程可以实现回收11.1kJ能量,达到了非常高效的能量回收性能.动臂速度表现为先增大再降低,可以获得更优的动臂控制性能.关键词:势能回收;节能回路;挖掘动臂;蓄能器DOI:10.13219/j.gjgyat.2023.04.004中图分类号:TU621;TH137文献标识码:A文章编号:1672G3953(2023)04G0017G004挖掘机已成为地铁工程建设领域的一类重要机械装备,其高能耗问题容易造成环境污染需尽力解决[1G3].在实际运行过程中,轮式挖掘机需要频繁操控挖掘装置,其中,动臂发生降落阶段,减少的重力势能经控制阀转变成了热能而造成浪费,并且也增加了液压系统的工作负载[4G5].相对于三腔液压缸负载敏感系统的节能控制效果,采用液电混合驱动技术可以使能耗进一步减小至53%,同时降低了动臂的速度超调范围,获得更小的波动性[6].李建松等[7]同时采用液压泵与马达组成能量转化部件,同时采用飞轮作为储能结构,实现了对动臂的势能回收,之后构建了仿真模型进行测试发现可以实现近62%的能量回收利用率.关澈等[8]主要分析了传统形式的动臂系统不能满足能量回收利用情况,利用模型仿真的方法进行测试发现,利用新设计的能量回收系统可以回收55%的动臂势能.相对于常规纯电驱液压动臂系统可以提升节能程度22.5%,为获得更优的动臂能量回收控制性能提供了理论参考.李泽鹏等[9]发现当动臂发生下降过程中,系统重力势能转变成蓄能器的液压能;当动臂进入举升阶段时,蓄能器内液压能可以为电动缸提供驱动辅助...