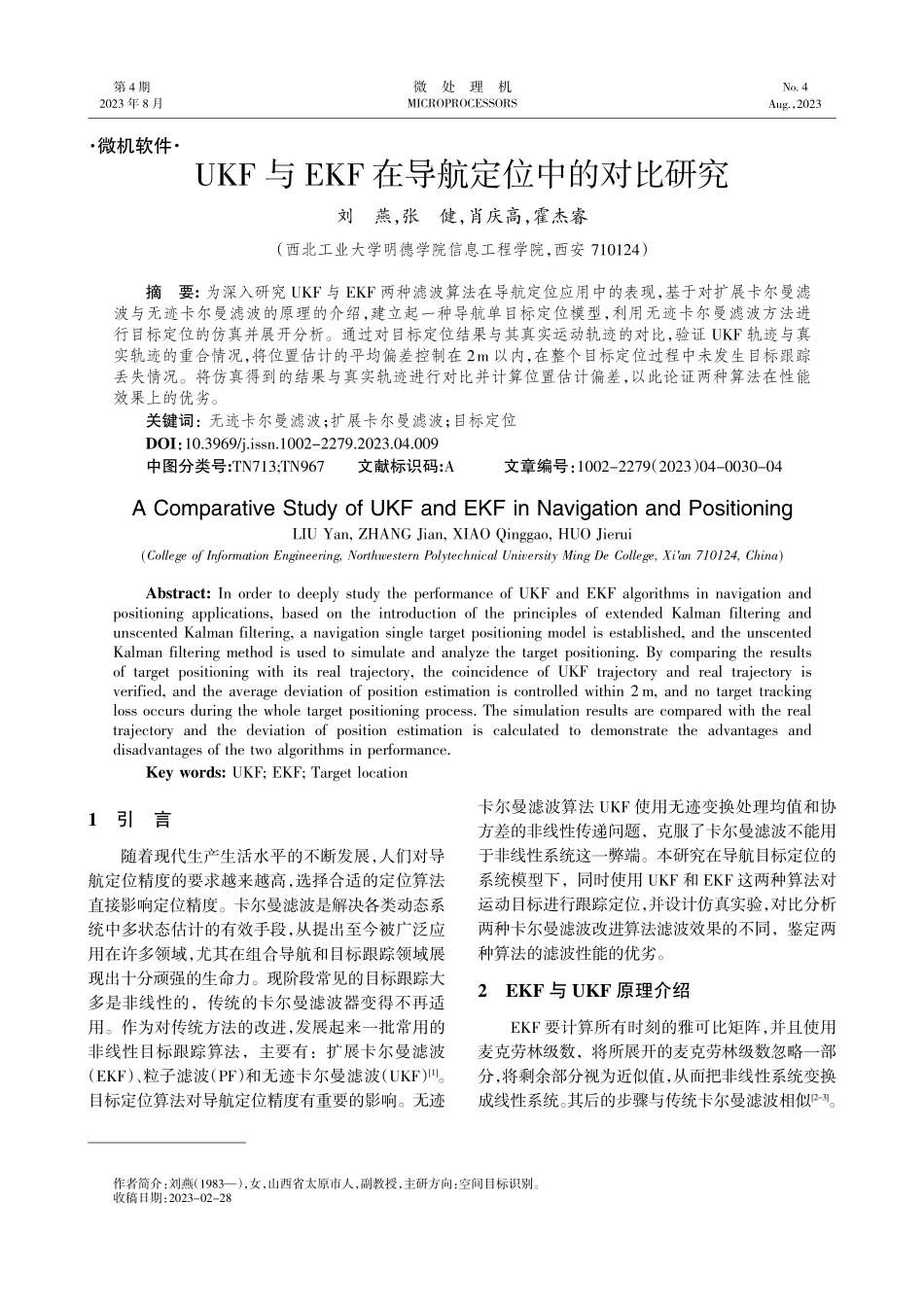
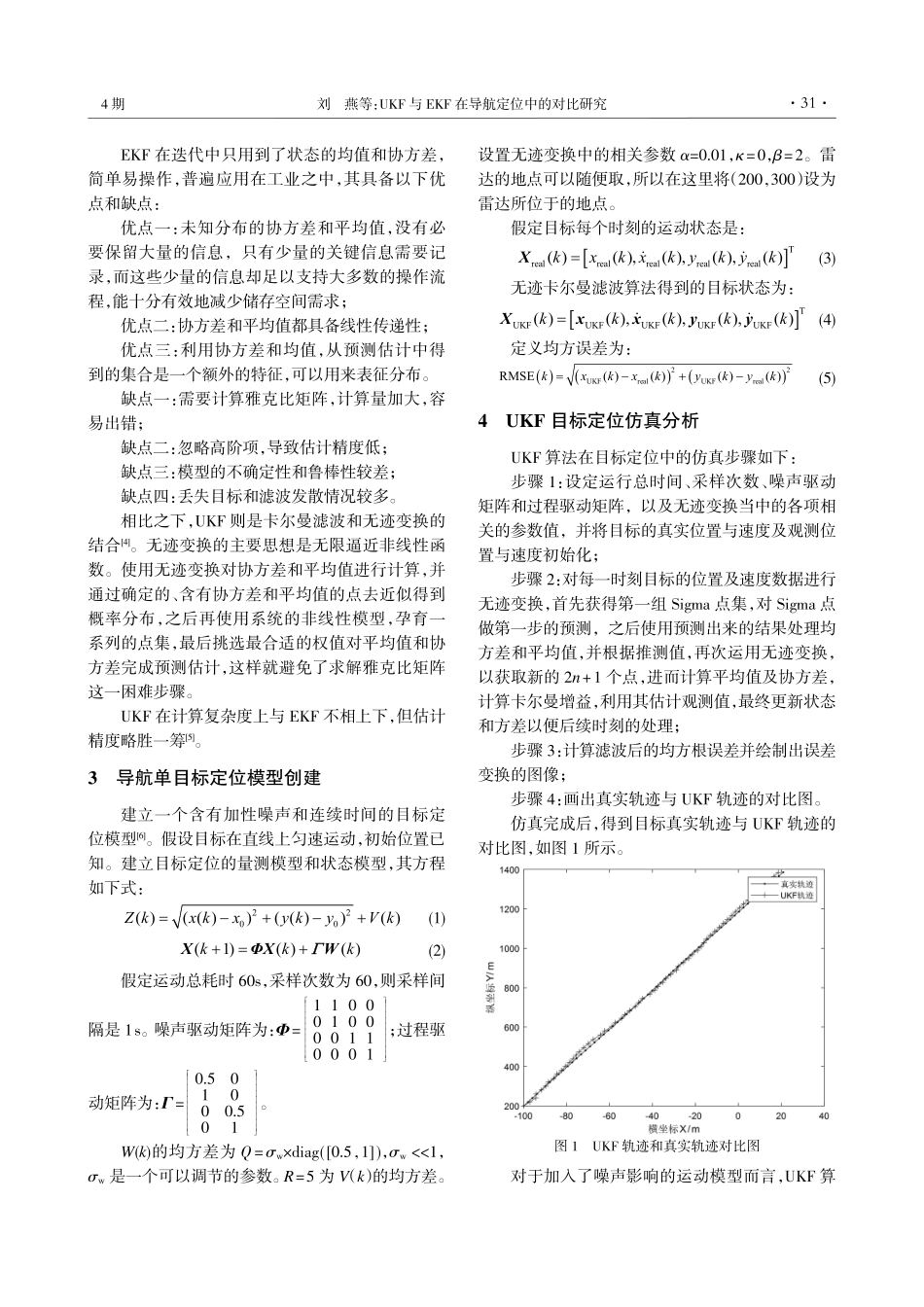
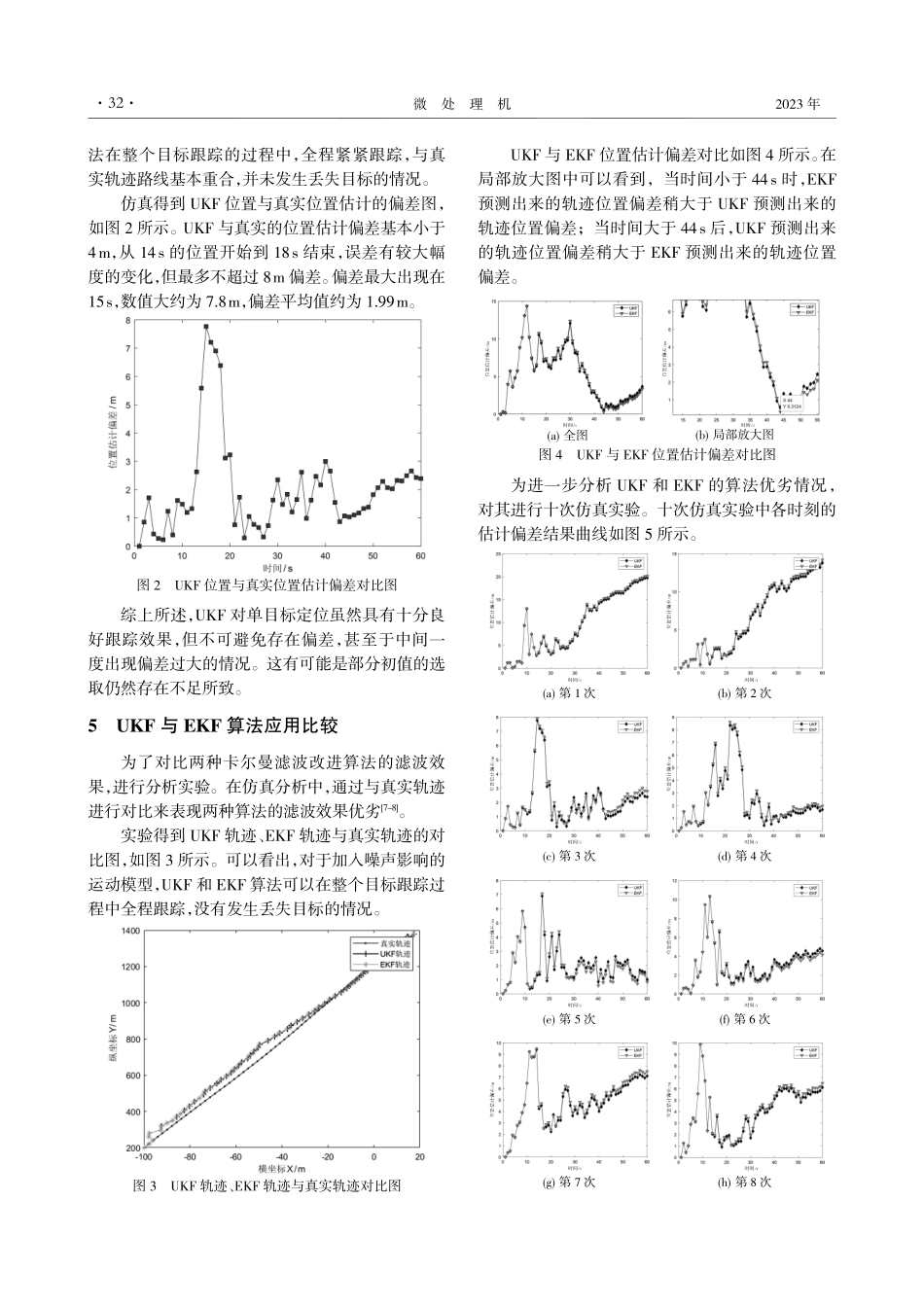
·微机软件·1引言随着现代生产生活水平的不断发展,人们对导航定位精度的要求越来越高,选择合适的定位算法直接影响定位精度。卡尔曼滤波是解决各类动态系统中多状态估计的有效手段,从提出至今被广泛应用在许多领域,尤其在组合导航和目标跟踪领域展现出十分顽强的生命力。现阶段常见的目标跟踪大多是非线性的,传统的卡尔曼滤波器变得不再适用。作为对传统方法的改进,发展起来一批常用的非线性目标跟踪算法,主要有:扩展卡尔曼滤波(EKF)、粒子滤波(PF)和无迹卡尔曼滤波(UKF)[1]。目标定位算法对导航定位精度有重要的影响。无迹卡尔曼滤波算法UKF使用无迹变换处理均值和协方差的非线性传递问题,克服了卡尔曼滤波不能用于非线性系统这一弊端。本研究在导航目标定位的系统模型下,同时使用哉运云和耘运云这两种算法对运动目标进行跟踪定位,并设计仿真实验,对比分析两种卡尔曼滤波改进算法滤波效果的不同,鉴定两种算法的滤波性能的优劣。2耘运云与哉运云原理介绍耘运云要计算所有时刻的雅可比矩阵,并且使用麦克劳林级数,将所展开的麦克劳林级数忽略一部分,将剩余部分视为近似值,从而把非线性系统变换成线性系统。其后的步骤与传统卡尔曼滤波相似[2-3]。UKF与EKF在导航定位中的对比研究刘燕,张健,肖庆高,霍杰睿(西北工业大学明德学院信息工程学院,西安710124)摘要:为深入研究UKF与EKF两种滤波算法在导航定位应用中的表现,基于对扩展卡尔曼滤波与无迹卡尔曼滤波的原理的介绍,建立起一种导航单目标定位模型,利用无迹卡尔曼滤波方法进行目标定位的仿真并展开分析。通过对目标定位结果与其真实运动轨迹的对比,验证UKF轨迹与真实轨迹的重合情况,将位置估计的平均偏差控制在2m以内,在整个目标定位过程中未发生目标跟踪丢失情况。将仿真得到的结果与真实轨迹进行对比并计算位置估计偏差,以此论证两种算法在性能效果上的优劣。关键词:无迹卡尔曼滤波;扩展卡尔曼滤波;目标定位DOI:10.3969/j.issn.1002-2279.2023.04.009中图分类号:TN713;TN967文献标识码:A文章编号:1002-2279(2023)04-0030-04AComparativeStudyofUKFandEKFinNavigationandPositioningLIUYan,ZHANGJian,XIAOQinggao,HUOJierui(CollegeofInformationEngineering,NorthwesternPolytechnicalUniversityMingDeCollege,Xian710124,China)Abstract:InordertodeeplystudytheperformanceofUKFandEKFalgorithmsinnavigationandpositioningapplications,basedonthein...