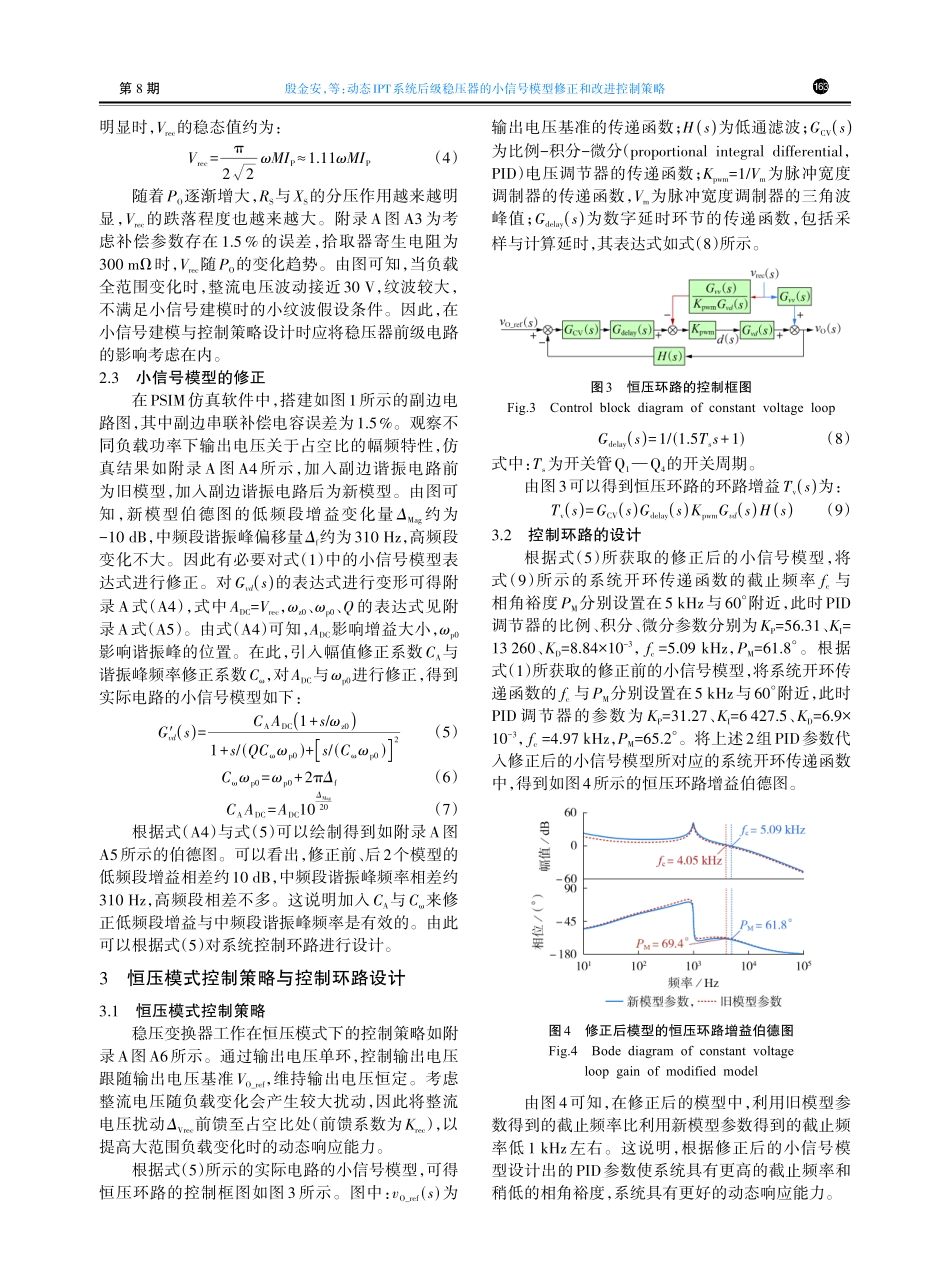
第43卷第8期2023年8月电力自动化设备ElectricPowerAutomationEquipmentVol.43No.8Aug.2023动态IPT系统后级稳压器的小信号模型修正和改进控制策略殷金安1,陈乾宏1,尹艳浩1,何明亮1,刘立东2(1.南京航空航天大学自动化学院,江苏南京211116;2.横店集团东磁股份有限公司,浙江东阳322118)摘要:针对单轨动态无线供电系统,在考虑整流桥前的电流断续及副边谐振电路寄生参数的影响下,分析了整流电压与负载的关系,指出因负载变化导致的整流电压大范围波动给后级稳压器的建模和闭环参数设计带来了挑战。为使后级稳压器小信号模型描述得更为准确,考虑了副边谐振电路的影响,引入幅值/频率修正系数,对后级稳压器小信号模型的低频段增益和中频段谐振峰频率进行了修正。在此基础上,为进一步提高系统的变负载动态响应能力,提出加入整流电压前馈环节。仿真与实验结果验证了理论分析的正确性和所提方案的有效性。关键词:动态无线电能传输;寄生参数;整流电压;小信号模型;控制策略中图分类号:TM46文献标志码:ADOI:10.16081/j.epae.2023010120引言相比接触式供电,感应电能传输(inductivepo-wertransfer,IPT)具有无磨损、维护成本低、可靠性高等优点[1],受到了广泛关注,其中动态IPT技术能为运动的负载实时供电,在电动汽车[2‐3]、单轨物流分拣[4]、自动导引小车[5]等领域具有良好的应用价值。在单轨物流分拣系统中,由于分拣小车电机的负载变化范围大,存在动态响应性能差的问题。为改善系统的输出动态性能,需要选取合适的控制策略对输出进行控制。常见的控制策略有原边控制[6‐8]、原副边控制[9‐11]以及副边控制[12‐16]。原边控制通过在原边设置检测电路,检测电压、电流信息,计算得到副边侧的输出电压、电流,从而实现对输出的调控,其副边轻便,但原边需要额外的检测电路,控制器实时计算量大。原副边控制通过原副边的实时通信反馈,调整原边输入电压、频率、相角等参数,实现对输出的调控,其延时大,不能实时响应输出的变化。副边控制响应速度快,动态IPT系统中常在副边侧加入DC-DC变换器直接针对输出进行调控。现有的副边控制,多只针对后级稳压器进行设计,通过优化算法或使用非线性控制方法来提高特定工况下的系统输出特性。如:文献[14]通过多目标优化算法,改善了系统在耦合条件、负载和补偿网络参数变化时的恒压性能。文献[15]通过线性自抗扰恒压输出控制算法,优化了系统启停、跟随参考、变负载的调节...