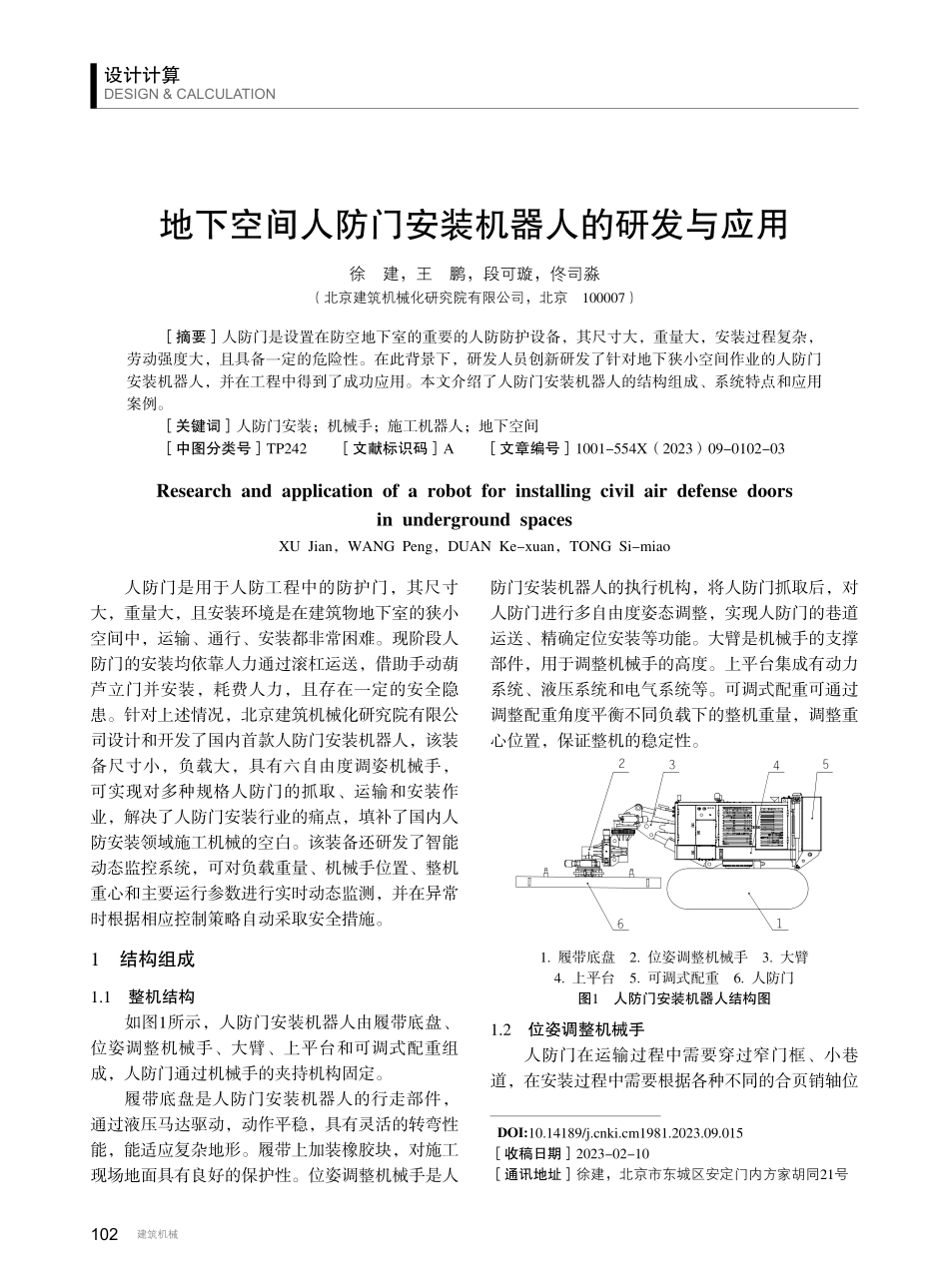
102建筑机械设计计算DESIGN&CALCULATION地下空间人防门安装机器人的研发与应用徐建,王鹏,段可璇,佟司淼(北京建筑机械化研究院有限公司,北京100007)[摘要]人防门是设置在防空地下室的重要的人防防护设备,其尺寸大,重量大,安装过程复杂,劳动强度大,且具备一定的危险性。在此背景下,研发人员创新研发了针对地下狭小空间作业的人防门安装机器人,并在工程中得到了成功应用。本文介绍了人防门安装机器人的结构组成、系统特点和应用案例。[关键词]人防门安装;机械手;施工机器人;地下空间[中图分类号]TP242[文献标识码]A[文章编号]1001-554X(2023)09-0102-03ResearchandapplicationofarobotforinstallingcivilairdefensedoorsinundergroundspacesXUJian,WANGPeng,DUANKe-xuan,TONGSi-miao人防门是用于人防工程中的防护门,其尺寸大,重量大,且安装环境是在建筑物地下室的狭小空间中,运输、通行、安装都非常困难。现阶段人防门的安装均依靠人力通过滚杠运送,借助手动葫芦立门并安装,耗费人力,且存在一定的安全隐患。针对上述情况,北京建筑机械化研究院有限公司设计和开发了国内首款人防门安装机器人,该装备尺寸小,负载大,具有六自由度调姿机械手,可实现对多种规格人防门的抓取、运输和安装作业,解决了人防门安装行业的痛点,填补了国内人防安装领域施工机械的空白。该装备还研发了智能动态监控系统,可对负载重量、机械手位置、整机重心和主要运行参数进行实时动态监测,并在异常时根据相应控制策略自动采取安全措施。1结构组成1.1整机结构如图1所示,人防门安装机器人由履带底盘、位姿调整机械手、大臂、上平台和可调式配重组成,人防门通过机械手的夹持机构固定。履带底盘是人防门安装机器人的行走部件,通过液压马达驱动,动作平稳,具有灵活的转弯性能,能适应复杂地形。履带上加装橡胶块,对施工现场地面具有良好的保护性。位姿调整机械手是人防门安装机器人的执行机构,将人防门抓取后,对人防门进行多自由度姿态调整,实现人防门的巷道运送、精确定位安装等功能。大臂是机械手的支撑部件,用于调整机械手的高度。上平台集成有动力系统、液压系统和电气系统等。可调式配重可通过调整配重角度平衡不同负载下的整机重量,调整重心位置,保证整机的稳定性。6123451.履带底盘2.位姿调整机械手3.大臂4.上平台5.可调式配重6.人防门图1人防门安装机器人结构图1.2位姿调整机械手人防门在运输过程中需要穿过窄门框、...