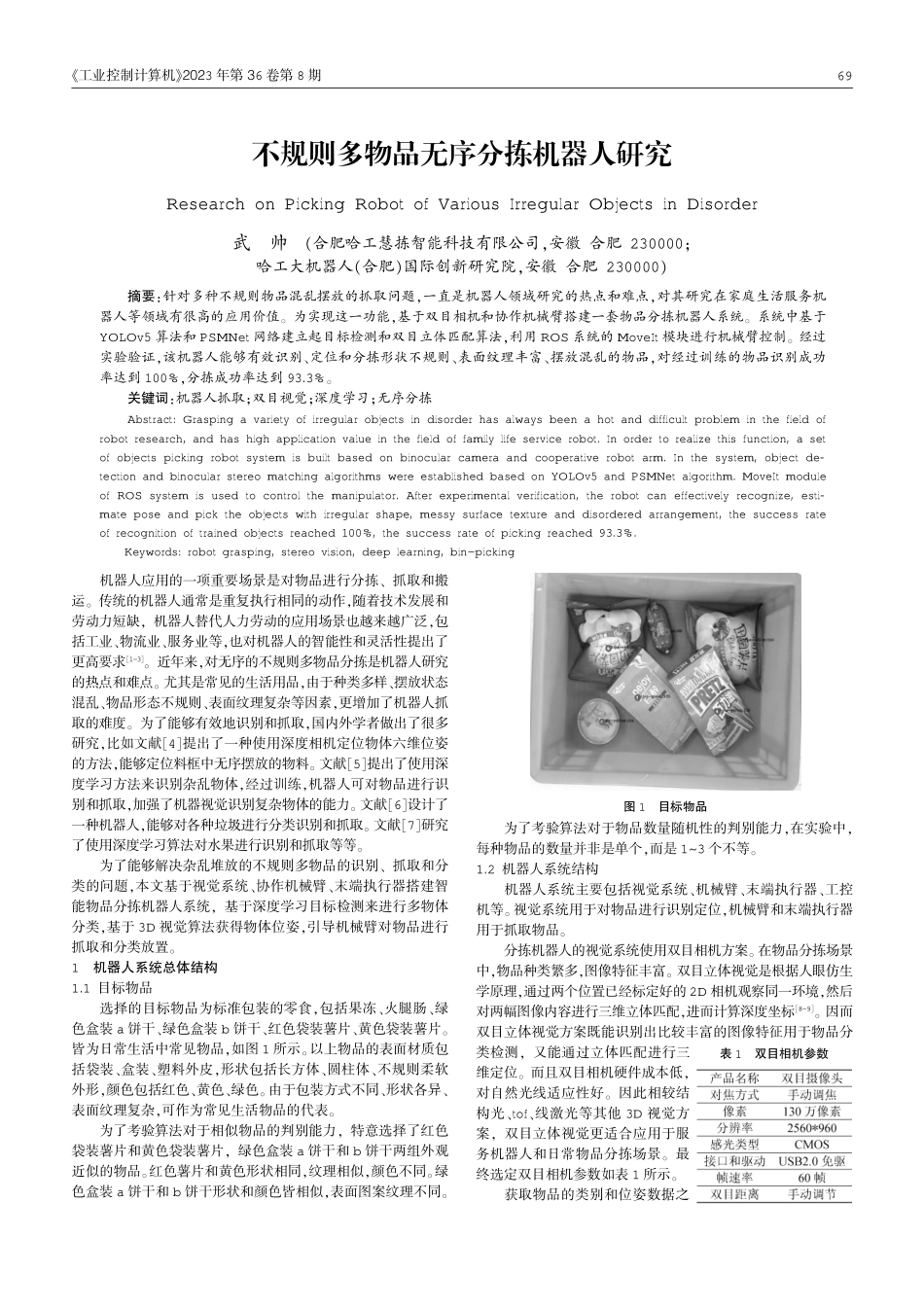
叶工业控制计算机曳圆园圆3年第猿6卷第8期表1双目相机参数机器人应用的一项重要场景是对物品进行分拣尧抓取和搬运遥传统的机器人通常是重复执行相同的动作袁随着技术发展和劳动力短缺袁机器人替代人力劳动的应用场景也越来越广泛袁包括工业尧物流业尧服务业等袁也对机器人的智能性和灵活性提出了更高要求咱1-3暂遥近年来袁对无序的不规则多物品分拣是机器人研究的热点和难点遥尤其是常见的生活用品袁由于种类多样尧摆放状态混乱尧物品形态不规则尧表面纹理复杂等因素袁更增加了机器人抓取的难度遥为了能够有效地识别和抓取袁国内外学者做出了很多研究袁比如文献咱4暂提出了一种使用深度相机定位物体六维位姿的方法袁能够定位料框中无序摆放的物料遥文献咱5暂提出了使用深度学习方法来识别杂乱物体袁经过训练袁机器人可对物品进行识别和抓取袁加强了机器视觉识别复杂物体的能力遥文献咱6暂设计了一种机器人袁能够对各种垃圾进行分类识别和抓取遥文献咱7暂研究了使用深度学习算法对水果进行识别和抓取等等遥为了能够解决杂乱堆放的不规则多物品的识别尧抓取和分类的问题袁本文基于视觉系统尧协作机械臂尧末端执行器搭建智能物品分拣机器人系统袁基于深度学习目标检测来进行多物体分类袁基于3D视觉算法获得物体位姿袁引导机械臂对物品进行抓取和分类放置遥1机器人系统总体结构1.1目标物品选择的目标物品为标准包装的零食袁包括果冻尧火腿肠尧绿色盒装a饼干尧绿色盒装b饼干尧红色袋装薯片尧黄色袋装薯片遥皆为日常生活中常见物品袁如图1所示遥以上物品的表面材质包括袋装尧盒装尧塑料外皮袁形状包括长方体尧圆柱体尧不规则柔软外形袁颜色包括红色尧黄色尧绿色遥由于包装方式不同尧形状各异尧表面纹理复杂袁可作为常见生活物品的代表遥为了考验算法对于相似物品的判别能力袁特意选择了红色袋装薯片和黄色袋装薯片袁绿色盒装a饼干和b饼干两组外观近似的物品遥红色薯片和黄色形状相同袁纹理相似袁颜色不同遥绿色盒装a饼干和b饼干形状和颜色皆相似袁表面图案纹理不同遥为了考验算法对于物品数量随机性的判别能力袁在实验中袁每种物品的数量并非是单个袁而是1耀3个不等遥1.2机器人系统结构机器人系统主要包括视觉系统尧机械臂尧末端执行器尧工控机等遥视觉系统用于对物品进行识别定位袁机械臂和末端执行器用于抓取物品遥分拣机器人的视觉系统使用双目相机方案遥在物品分拣场景中袁物品种类繁多袁图像特征丰富遥双目立体视觉是根据人眼仿生学原理袁通过两个位...