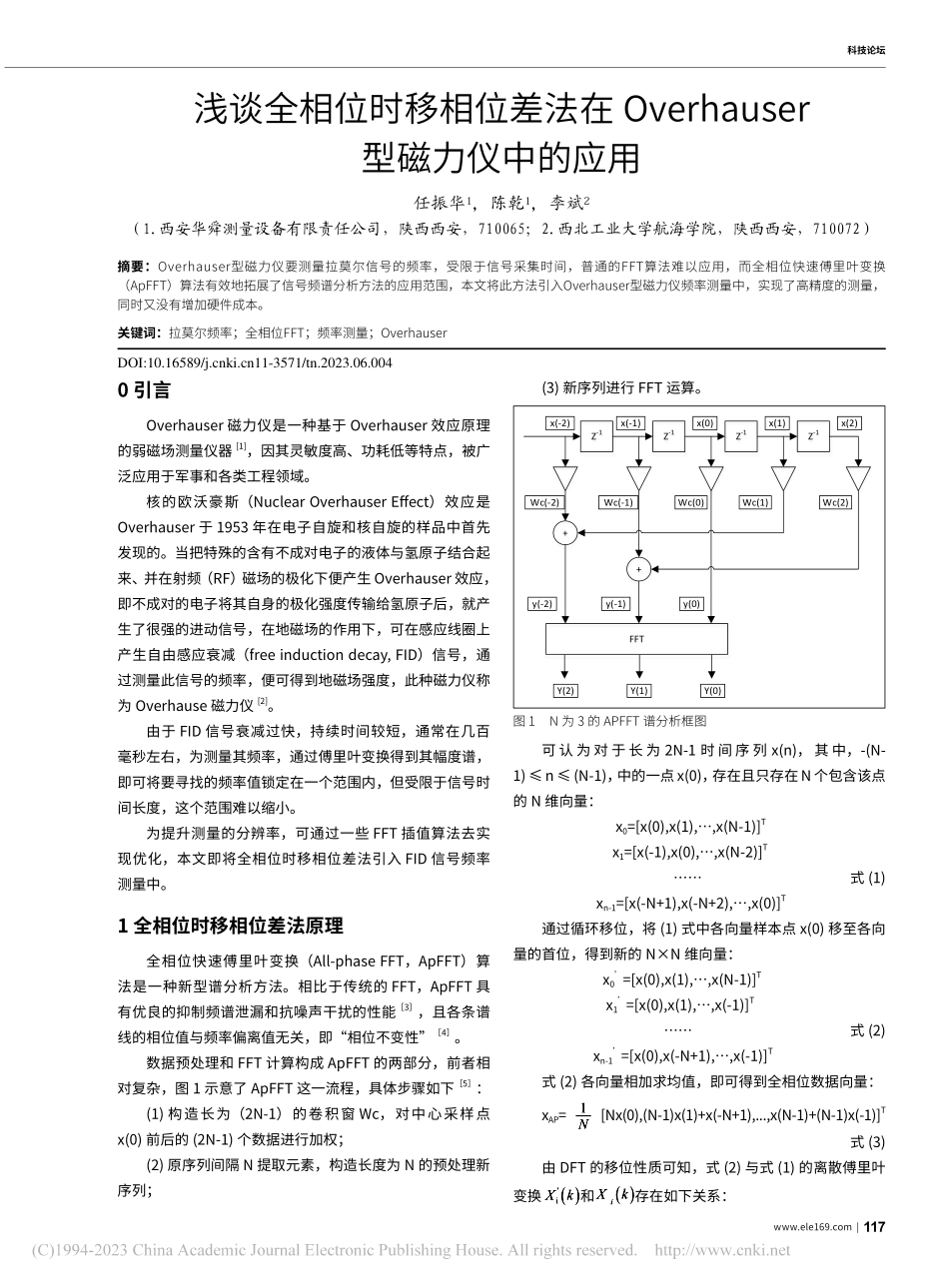
www.ele169.com|117科技论坛0引言Overhauser磁力仪是一种基于Overhauser效应原理的弱磁场测量仪器[1],因其灵敏度高、功耗低等特点,被广泛应用于军事和各类工程领域。核的欧沃豪斯(NuclearOverhauserEffect)效应是Overhauser于1953年在电子自旋和核自旋的样品中首先发现的。当把特殊的含有不成对电子的液体与氢原子结合起来、并在射频(RF)磁场的极化下便产生Overhauser效应,即不成对的电子将其自身的极化强度传输给氢原子后,就产生了很强的进动信号,在地磁场的作用下,可在感应线圈上产生自由感应衰减(freeinductiondecay,FID)信号,通过测量此信号的频率,便可得到地磁场强度,此种磁力仪称为Overhause磁力仪[2]。由于FID信号衰减过快,持续时间较短,通常在几百毫秒左右,为测量其频率,通过傅里叶变换得到其幅度谱,即可将要寻找的频率值锁定在一个范围内,但受限于信号时间长度,这个范围难以缩小。为提升测量的分辨率,可通过一些FFT插值算法去实现优化,本文即将全相位时移相位差法引入FID信号频率测量中。1全相位时移相位差法原理全相位快速傅里叶变换(All-phaseFFT,ApFFT)算法是一种新型谱分析方法。相比于传统的FFT,ApFFT具有优良的抑制频谱泄漏和抗噪声干扰的性能[3],且各条谱线的相位值与频率偏离值无关,即“相位不变性”[4]。数据预处理和FFT计算构成ApFFT的两部分,前者相对复杂,图1示意了ApFFT这一流程,具体步骤如下[5]:(1)构造长为(2N-1)的卷积窗Wc,对中心采样点x(0)前后的(2N-1)个数据进行加权;(2)原序列间隔N提取元素,构造长度为N的预处理新序列;(3)新序列进行FFT运算。Z-1Z-1Z-1Z-1++x(-2)x(-1)x(0)x(1)x(2)Wc(-2)Wc(-1)Wc(0)Wc(1)Wc(2)FFTy(-2)y(-1)y(0)Y(2)Y(1)Y(0)图1N为3的APFFT谱分析框图可认为对于长为2N-1时间序列x(n),其中,-(N-1)≤n≤(N-1),中的一点x(0),存在且只存在N个包含该点的N维向量:x0=[x(0),x(1),…,x(N-1)]Tx1=[x(-1),x(0),…,x(N-2)]T……式(1)xn-1=[x(-N+1),x(-N+2),…,x(0)]T通过循环移位,将(1)式中各向量样本点x(0)移至各向量的首位,得到新的N×N维向量:x0’=[x(0),x(1),…,x(N-1)]Tx1’=[x(0),x(1),…,x(-1)]T……式(2)xn-1’=[x(0),x(-N+1),…,x(-1)]T式(2)各向量相加求均值,即可得到全相位数据向量:xAP=1N[Nx(0),(N-1)x(1)+x(-N+1),...,x(N-1)+(N-1)x(-1)]T式(3)由DFT的移位性质可知,式(2)与式(1)的离散傅里叶变换()()2'ikijNiXkXkeπ=和()()2'ikijNiXkXke...