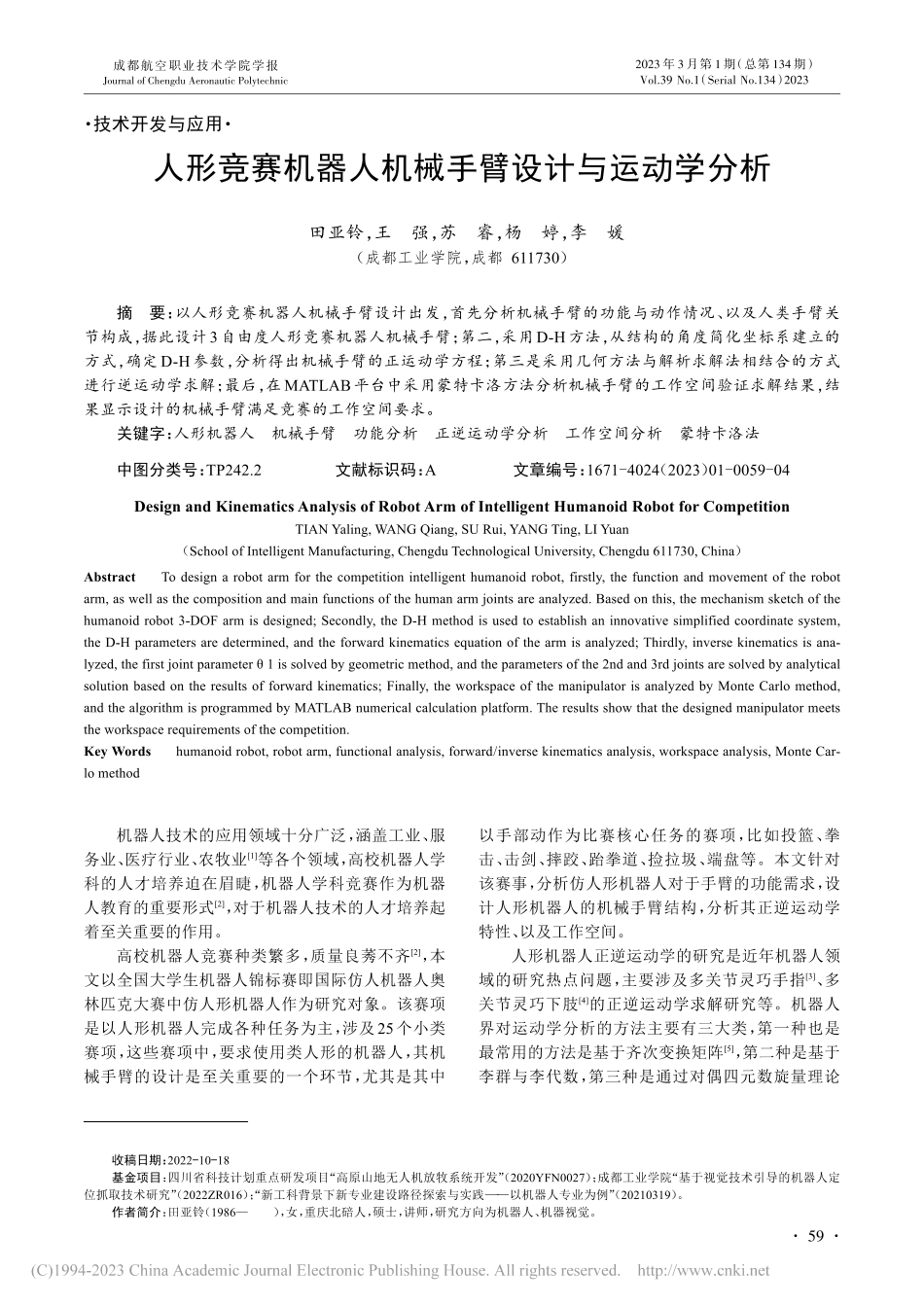
表达[6]。也有一部分文献是在这三种方法的基础之上,创新结构设计,以简化后续求解过程[7]。机器人运动空间的分析方法很多,普遍采用蒙特卡洛方法[8]。一、机械手臂功能分析与结构设计人形机器人手臂的设计主要考虑机器人实现的功能,本文以投篮机器人为例来分析设计,投篮机器人对于手臂的要求接近人类手臂,要求能够支撑手部抱、持、投、放篮球的动作。对照人形手臂构型可知:肩关节是人类日常生活中最为重要的一个关节,肩关节不仅控制着我们的肩膀活动,还起到了调节我们的胳膊运动以及各关节间的协调运动,这些运动都需要运用到肩关节。肘关节的主要功能是屈曲和伸直作用,其次具有旋转功能。腕关节的作用是将手部的力量和动作传递到前臂和近端上肢。人类的这三个关节结构十分复杂,自由度多,动作灵活,本文参照人类手臂的构型,进行简化设计,设计简单易实现并且满足比赛需求的机械手臂。手臂的构型仍然保持人类的三大关节:肩关节、肘关节和腕关节,基于满足动作需求的前提精简各关节自由度以及结构复杂度,设计保留三大关节的主运动。其中,肩关节以人体穿过肩部的矢状轴为转轴进行旋转运动,肘关节以垂直于大臂的轴线为转轴进行旋转运动,腕关节以垂直于小臂的轴线为转轴进行旋转运动,其机构简图如图1。图1人形机械臂机构简图与D-H坐标系二、正向运动学分析机械手臂的运动学分析是分析机械手臂各关节的状态与机械手臂末端的位姿状态之间的关系。它对机械手臂运动分析以及后续的运动控制有着关键作用。为描述和研究人形机器人手臂的运动和关节之间的关系,以及为后续运动控制打下基础,本文使用齐次坐标变换的方法,用D-H方法建立杆件坐标系,并以单臂为对象进行机械手臂运动学分析。通过建立如图1所示的D-H坐标系,可以确定连杆(大臂、小臂)坐标系间变换矩阵,再通过各个连杆参数可以确定各连杆的D-H参数与关节变量之间的关系。此处,为了简化后面的计算,由于肩关节到肘关节的长度一定为l1,且肩关节只绕关节轴线转动,因此本文创新的做了结构简化,不考虑这个平移,直接将基座标系和第一杆件坐标系建立在同一个位置,也就是手臂的零位在肘关节处,这一简化只是简化运算,对运动分析并没有影响。本文设计的机器人手臂的运动副都是转动副,属于转动机器人。所以该机器人的关节变量只有转动关节变量θ,其他参数则是大臂和小臂的长,由结构决定。D-H参数如表1。表1人形机器人手臂D-H参数连杆123关节变量θiθ1θ2θ3杆件长度ai0l2l3杆...