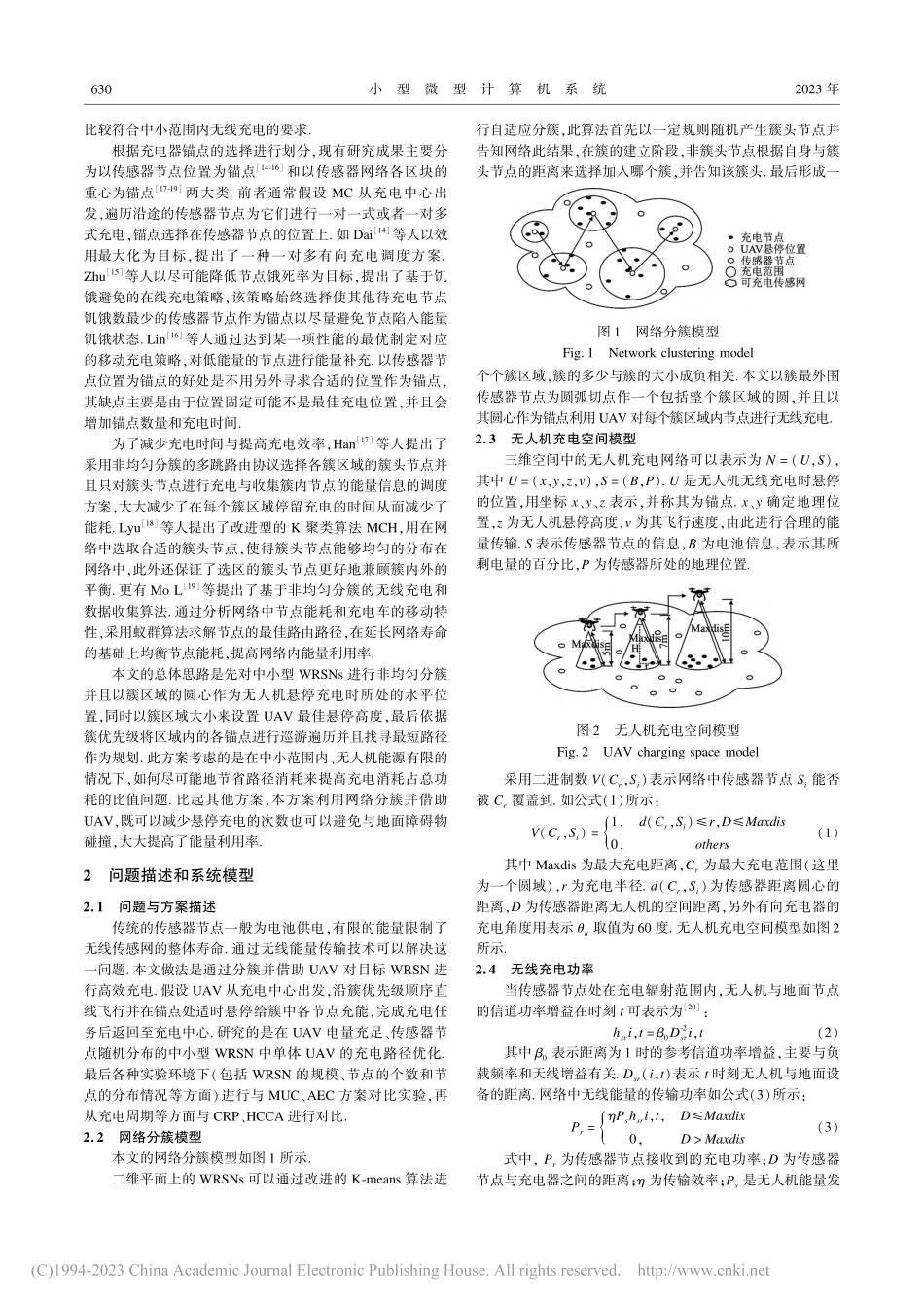
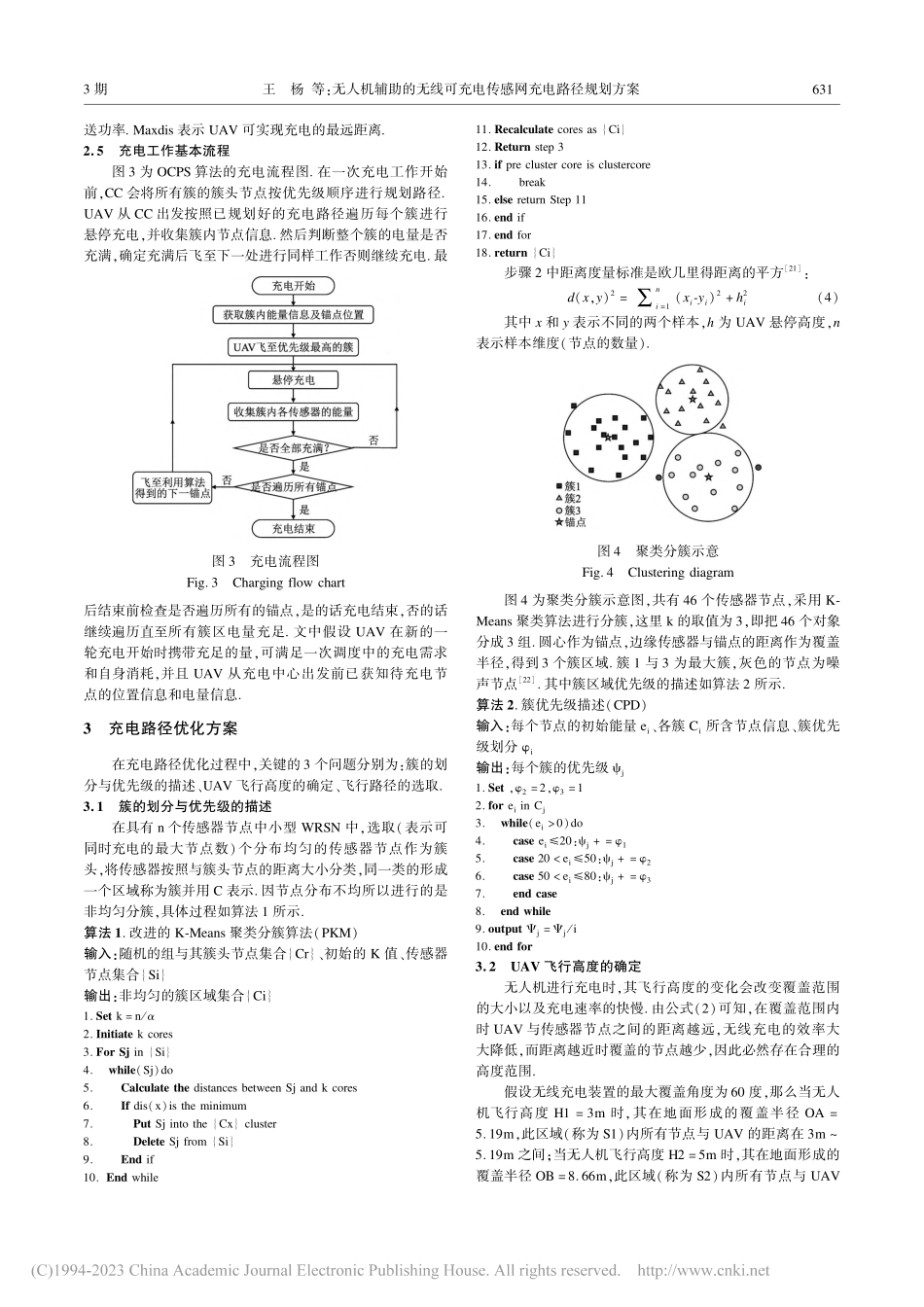
小型微型计算机系统JournalofChineseComputerSystemsDOI:10.20009/j.cnki.21⁃1106/TP.2021⁃06662023年3月第3期Vol.44No.32023收稿日期:2021⁃08⁃20收修改稿日期:2021⁃11⁃10基金项目:国家自然科学基金项目(61871412)资助;安徽建筑大学智能建筑与建筑节能安徽省重点实验室开放课题项目(IBES2020KF05)资助.作者简介:王杨,男,1971年生,博士,教授,CCF会员,研究方向为可充电传感网、机器学习、系统优化;单天乐,男,1999年生,硕士研究生,研究方向为无线可充电传感网;赵传信,男,1977年生,博士,教授,研究方向为物联网技术与无线可充电传感网;陈鹏,男,1975年生,博士,讲师,研究方向为机器学习;艾世成,男,1994年生,硕士,助教,研究方向为网络优化.无人机辅助的无线可充电传感网充电路径规划方案王杨1,2,单天乐1,赵传信1,陈鹏1,艾世成31(安徽师范大学计算机与信息学院,安徽芜湖241000)2(安徽建筑大学智能建筑与建筑节能安徽省重点实验室,合肥230022)3(东南大学计算机科学与工程学院,南京211189)E⁃mail:wycap@126.com摘要:针对传统无线可充电传感网(WRSNs)存在传感器节点较为分散导致的充电效率低问题,提出了一种基于对WRSN进行分簇的无人机(UAV)充电路径优化方案(OptimizedChargingPathScheme,OCPS).方案首先将目标区域根据聚类算法划分为不大于充电器最大可覆盖范围的子区域并称其为簇;然后确定各簇区域锚点以及优先级并对充电最优路径进行选择;最后借助无人机给所有簇内传感器节点充能并返回充电中心(ChargeCenter,CC).仿真实验验证了方案的可行性,实验结果与AEC、MUC方案相比,OCPS方案的充电效率分别提高了约19.5%、27.9%,平均饿死节点数分别降低0.3、1.2个.与CRP、HCCA方案相比,OCPS的飞行长度与充电时长都有明显缩短.关键词:无线可充电传感网;簇优先级;最优充电路径规划;最大可覆盖范围;无人机中图分类号:TP393文献标识码:A文章编号:1000⁃1220(2023)03⁃0629⁃07UAV⁃assistedChargingPathPla...