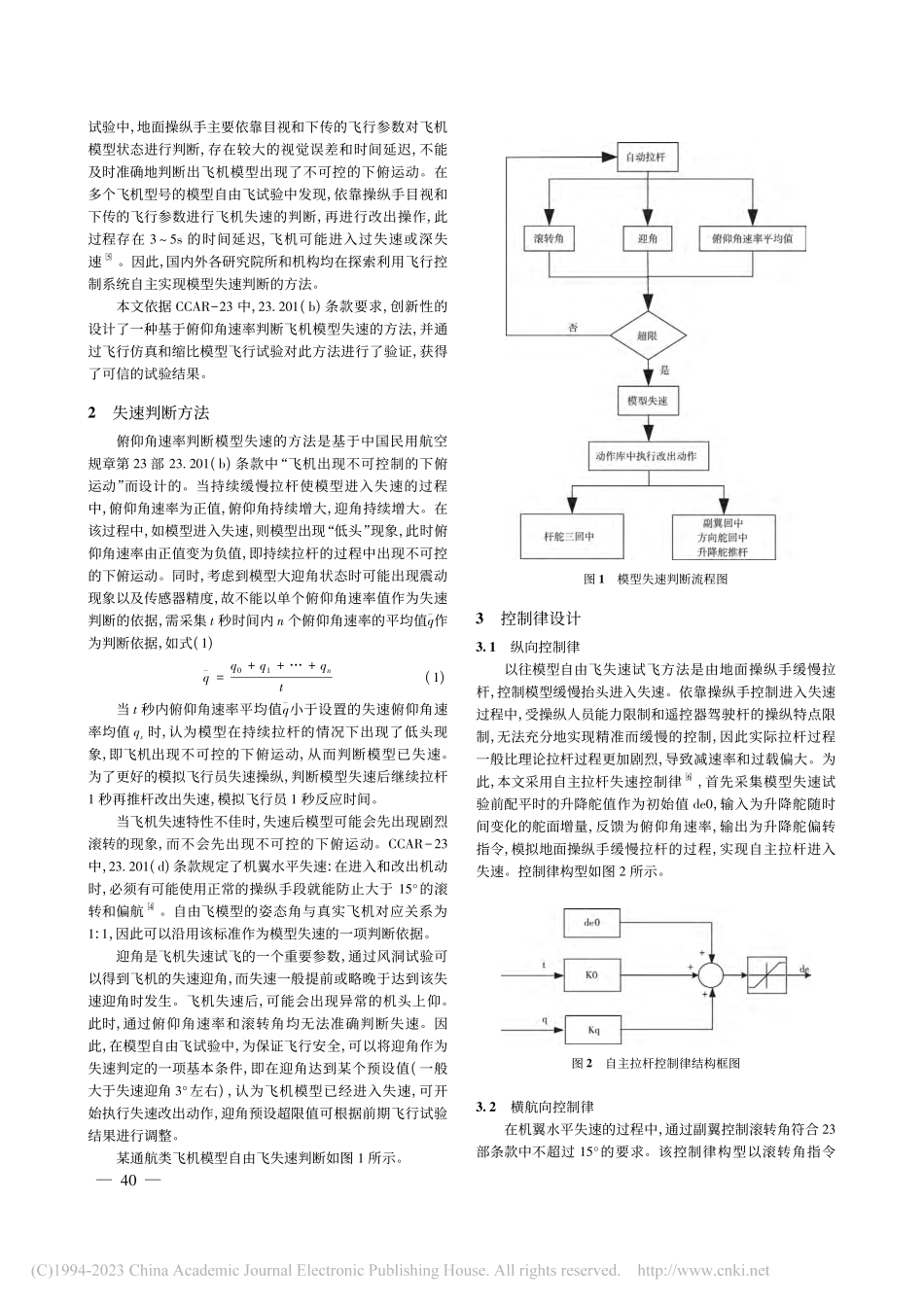
收稿日期:2021-03-01修回日期:2021-03-07第40卷第2期计算机仿真2023年2月文章编号:1006-9348(2023)02-0039-04一种缩比模型自由飞试验失速判断方法粟建波1,张甲奇2,邱宇豪2,王锦锦2(1.桂林电子科技大学,广西桂林541704;2.中国飞行试验研究院中航工业飞行仿真航空科技重点实验室,陕西西安710089)摘要:针对某通航类飞机缩比模型自由飞失速特性试验中,难以准确判断飞机模型进入失速的问题,根据中国民用航空规章第23部中失速相关条款的要求,提出了依据俯仰角速率变化判断飞机模型出现不可控下俯运动趋势,进而判断飞机模型失速的方法,通过建立该飞机六自由度非线性仿真模型进行仿真验证,同时利用缩比模型自由飞飞行试验对此方法进行了验证。试验结果表明:上述方法能够准确的判断飞机进入失速,进而提高了缩比模型自由飞试验的精准度。关键词:模型自由飞;失速特性;失速判断中图分类号:V249.1文献标识码:BAJudgmentMethodforStallinFree-FlightTestofReducedRatioModelSUJian-bo1,ZHANGJia-qi2,QIUYu-hao2,WANGJin-jin2(1.GuilinUniversityofElectronicTechnology,GuilinGuangxi541704,China;2.AVICAeronauticalScienceandTechnologyKeyLaboratoryofFlightSimulation,CFTE,Xi’anShanxi710089,China)ABSTRACT:Aimingattheproblemthatitisdifficulttoaccuratelyjudgewhethertheairplanemodelenteringthestallduringthefree-flyingstallcharacteristicstestofageneralaviationaircraftscaledmodel,accordingtothere-quirementsofthestallrelatedclausesinPart23oftheCivilAviationRegulationsofChina,amethodwasproposedforjudgingtheuncontrollablepitchingmotiontrendoftheairplanemodelbasedonthechangeofthepitchanglerate.Thenthemethodofjudgingthestalloftheaircraftmodelwasverifiedbyestablishingasix-degree-of-freedomnon-linearsimulationmodeloftheaircraft.Atthesametime,themethodwasverifiedbythefreeflighttestofthescaled-downmodel.Thetestresultsshowthatthismethodcanaccuratelydeterminethattheaircrafthasenteredastall,therebyimprovingtheaccuracyofthescaledmodelfreeflighttest.KEYWORDS:Modelfree-flight;Stallcharacteristics;Stalljudgment1引言缩比模型自由飞试验是遵循几何、质量特性、动力相似准则关系,使用全尺寸飞机缩比模型,在真实大气环境中开展的飞行试验,...