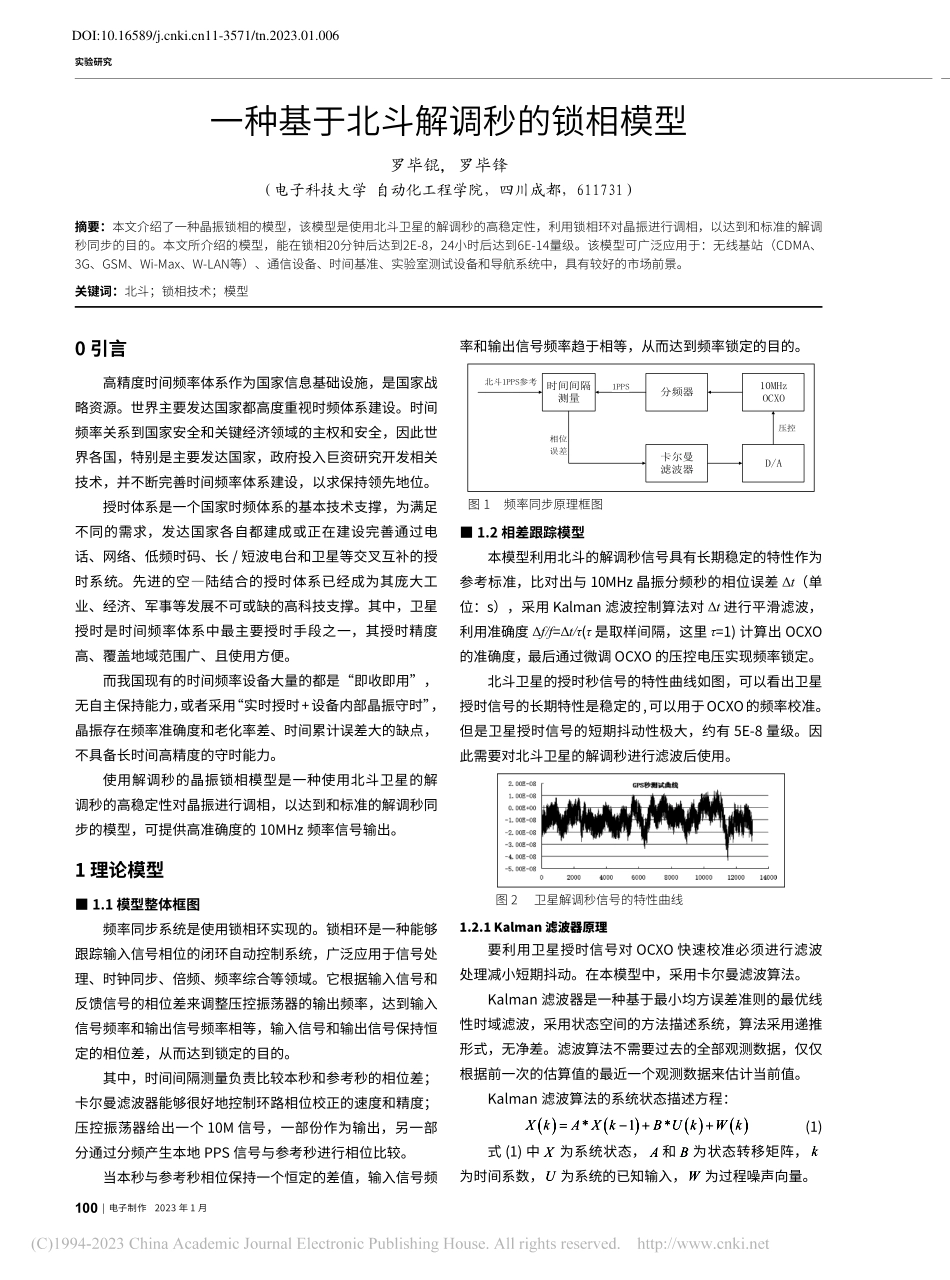
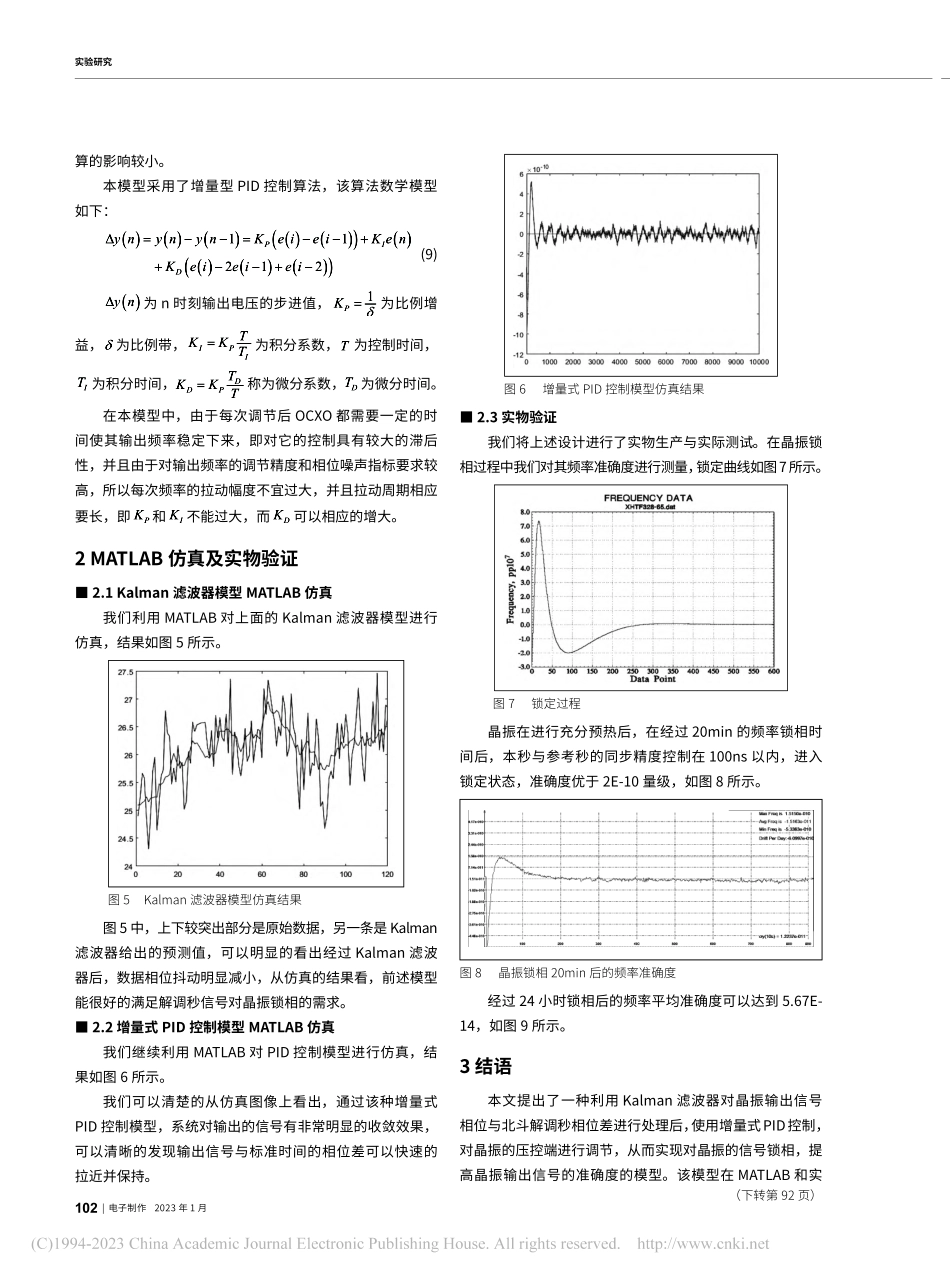
100|电子制作2023年1月实验研究0引言高精度时间频率体系作为国家信息基础设施,是国家战略资源。世界主要发达国家都高度重视时频体系建设。时间频率关系到国家安全和关键经济领域的主权和安全,因此世界各国,特别是主要发达国家,政府投入巨资研究开发相关技术,并不断完善时间频率体系建设,以求保持领先地位。授时体系是一个国家时频体系的基本技术支撑,为满足不同的需求,发达国家各自都建成或正在建设完善通过电话、网络、低频时码、长/短波电台和卫星等交叉互补的授时系统。先进的空—陆结合的授时体系已经成为其庞大工业、经济、军事等发展不可或缺的高科技支撑。其中,卫星授时是时间频率体系中最主要授时手段之一,其授时精度高、覆盖地域范围广、且使用方便。而我国现有的时间频率设备大量的都是“即收即用”,无自主保持能力,或者采用“实时授时+设备内部晶振守时”,晶振存在频率准确度和老化率差、时间累计误差大的缺点,不具备长时间高精度的守时能力。使用解调秒的晶振锁相模型是一种使用北斗卫星的解调秒的高稳定性对晶振进行调相,以达到和标准的解调秒同步的模型,可提供高准确度的10MHz频率信号输出。1理论模型■1.1模型整体框图频率同步系统是使用锁相环实现的。锁相环是一种能够跟踪输入信号相位的闭环自动控制系统,广泛应用于信号处理、时钟同步、倍频、频率综合等领域。它根据输入信号和反馈信号的相位差来调整压控振荡器的输出频率,达到输入信号频率和输出信号频率相等,输入信号和输出信号保持恒定的相位差,从而达到锁定的目的。其中,时间间隔测量负责比较本秒和参考秒的相位差;卡尔曼滤波器能够很好地控制环路相位校正的速度和精度;压控振荡器给出一个10M信号,一部份作为输出,另一部分通过分频产生本地PPS信号与参考秒进行相位比较。当本秒与参考秒相位保持一个恒定的差值,输入信号频率和输出信号频率趋于相等,从而达到频率锁定的目的。时间间隔测量分频器10MHzOCXOD/A卡尔曼滤波器北斗1PPS参考1PPS压控相位误差图1频率同步原理框图■1.2相差跟踪模型本模型利用北斗的解调秒信号具有长期稳定的特性作为参考标准,比对出与10MHz晶振分频秒的相位误差Δt(单位:s),采用Kalman滤波控制算法对Δt进行平滑滤波,利用准确度Δf/f=Δt/τ(τ是取样间隔,这里τ=1)计算出OCXO的准确度,最后通过微调OCXO的压控电压实现频率锁定。北斗卫星的授时秒信号的特性曲线如图,可以看出卫星授时信号的长期特性是稳定的,可...