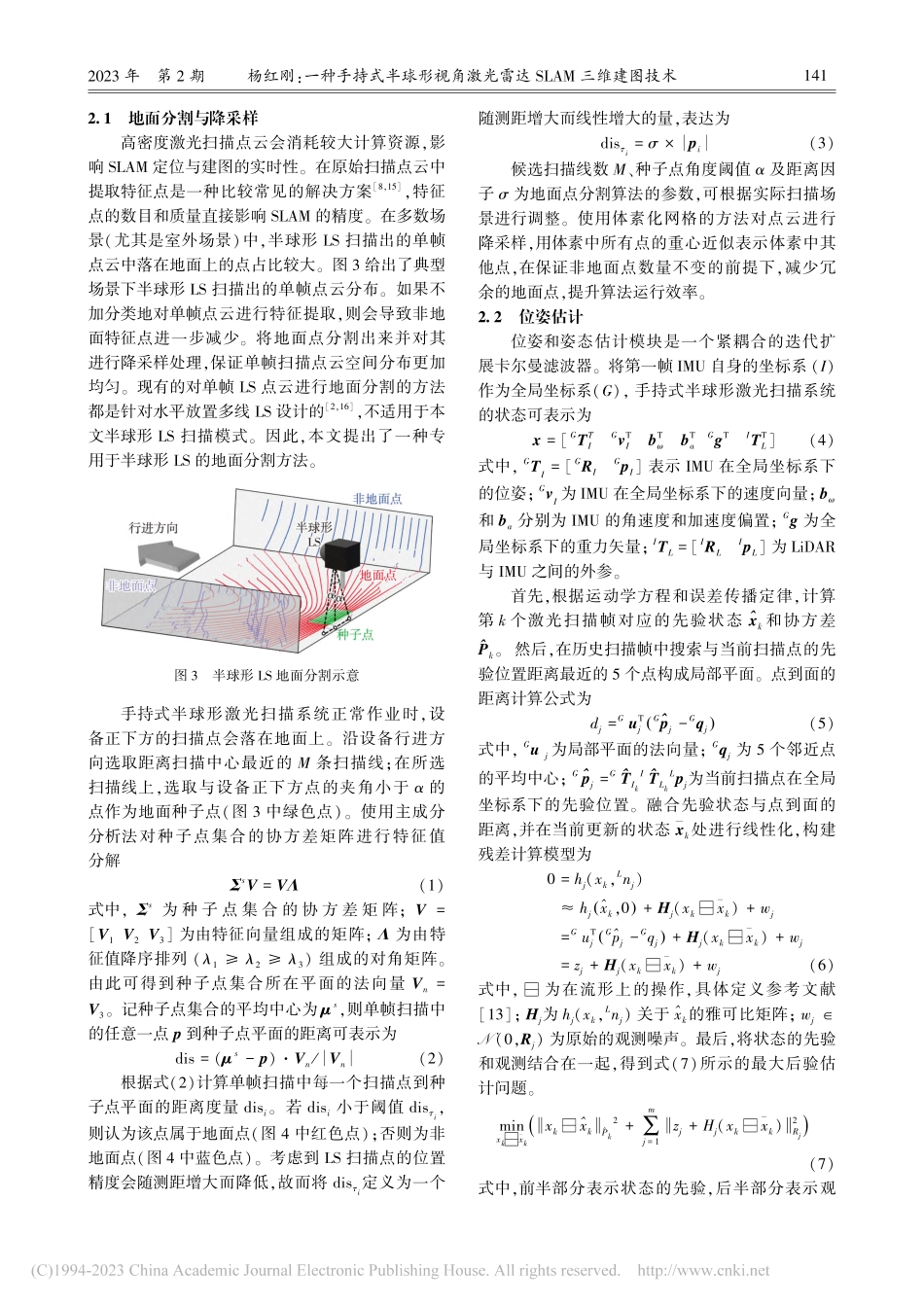
2023年第2期杨红刚:一种手持式半球形视角激光雷达SLAM三维建图技术引文格式:杨红刚.一种手持式半球形视角激光雷达SLAM三维建图技术[J].测绘通报,2023(2):139⁃144.DOI:10.13474/j.cnki.11⁃2246.2023.0054.一种手持式半球形视角激光雷达SLAM三维建图技术杨红刚(中铁第四勘察设计院集团有限公司,湖北武汉430063)摘要:针对室内外场景快速三维建图问题,本文提出了一种半球形视角激光雷达扫描同时定位与建图(SLAM)方法,设计了集成半球形视角激光雷达和惯性测量单元的手持便携式三维激光扫描系统。首先,根据半球形视角激光雷达扫描线结构特征,对分割的地面点云降采样,减少垂直约束冗余。然后,对惯性测量单元(IMU)和降采样激光点云通过一个紧耦合迭代扩展卡尔曼滤波器(iEKF)进行联合位姿估计。最后,使用因子图增量式后端优化处理消除累积误差,提升点云地图精度。采用本文方法研发的原型系统对典型室内外场景进行建图试验,结果表明:本文方法绝对定位精度优于4‰,相对定位精度优于0.3‰,在室内外一体化三维建图方面具有广阔应用前景。关键词:同时定位与建图;半球形视角激光雷达;因子图优化;手持式激光扫描系统;三维点云中图分类号:P237文献标识码:A文章编号:0494⁃0911(2023)02⁃0139⁃06AHandheld3DmappingtechnologybasedonhemisphericallaserscannerSLAMapproachYANGHonggang(ChinaRailwaySiyuanSurveyandDesignGroupCo.,Ltd.,Wuhan430063,China)Abstract:Inordertosolvetheproblemofrapid3Dmappingforindoorandoutdoorscenes,ahemisphericallaserscannerbasedsimultaneouslocalizationandmapping(SLAM)methodisproposed,andahandheldportable3Dlaserscanningsystemintegratinghemisphericalanglelaserscannerandinertialmeasurementuni...