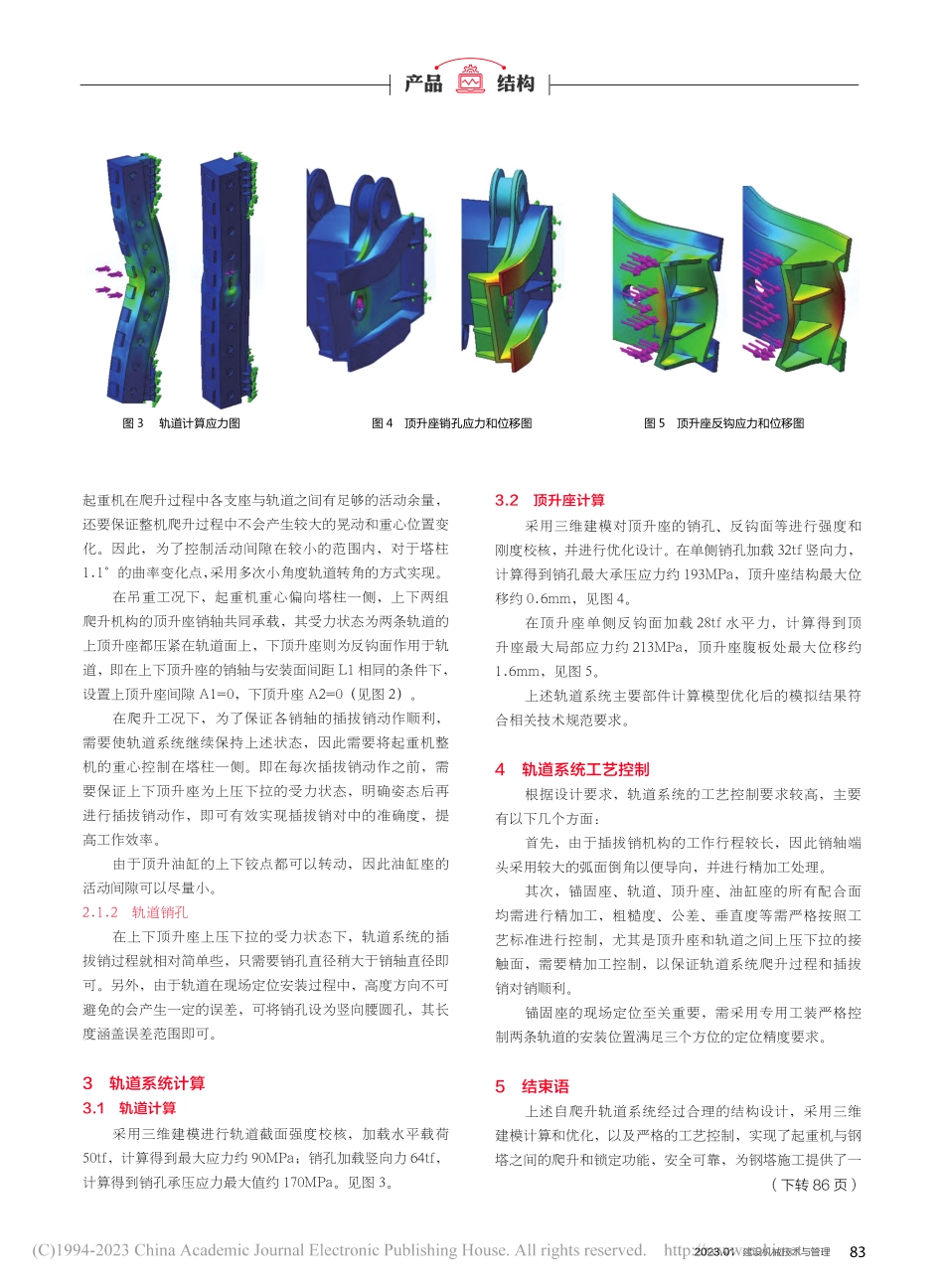
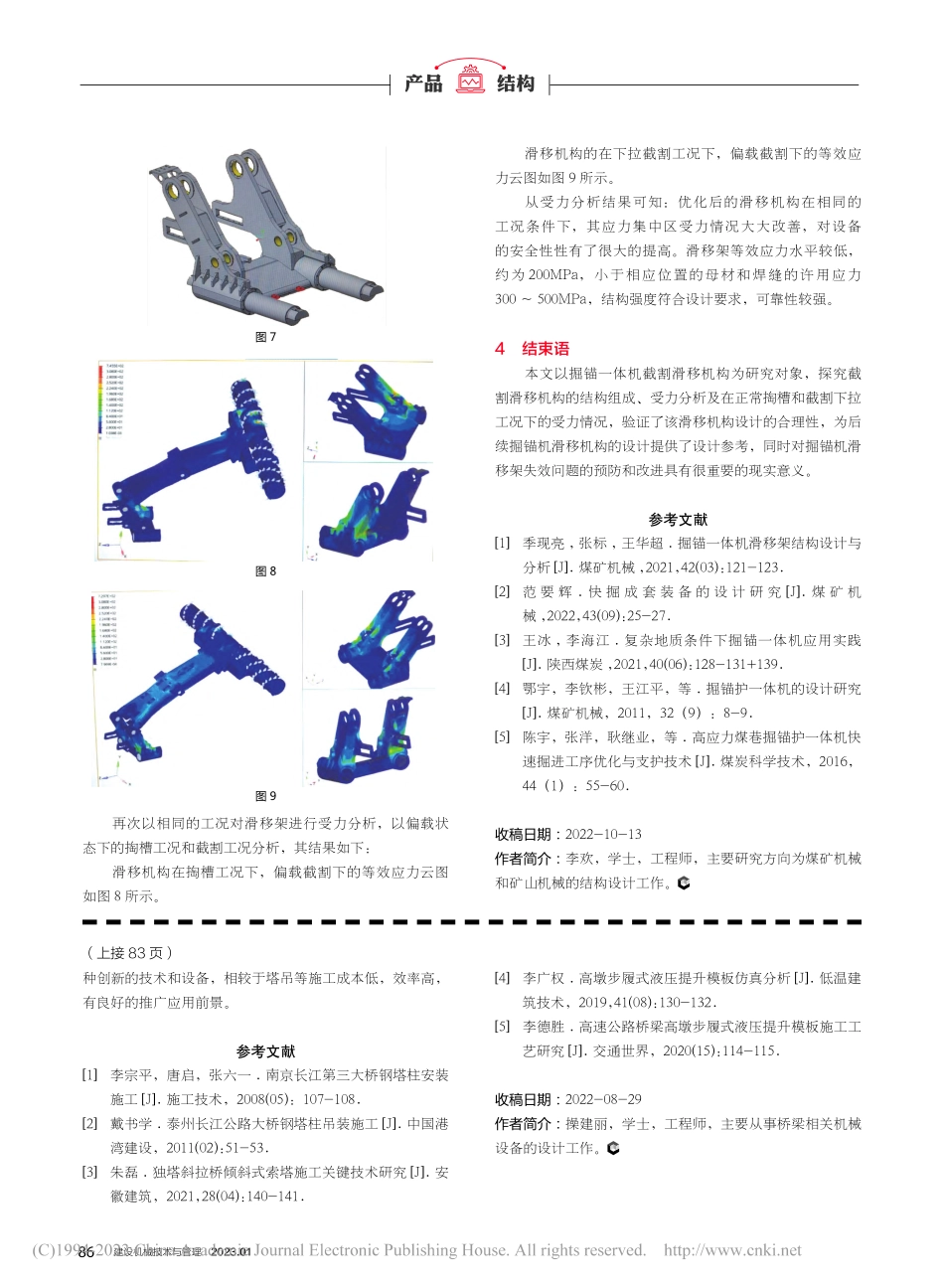
82建设机械技术与管理2023.01产品结构一种自爬升轨道系统的设计和研究ASelf-climbingOrbitSystemDesignandResearch操建丽盛朝晖(武汉武桥交通装备技术有限公司,湖北武汉430000)摘要:对于较高的桥梁钢塔安装,可采用一种爬模和液压步履走行相结合的自爬升起重机,取代传统的塔吊方式。该起重机可依附在塔壁上自动进行爬升和下降,也可以锁定销轴后进行钢塔节段吊装。其轨道系统通过在各支座与轨道之间设置合理的间隙,允许轨道经过数次较小的转角,以便度过变截面塔柱的曲率变化点。关键词:爬升;轨道;插拔销;支座;曲率变化点中图分类号:TH213.5文献标识码:A1引言一般斜拉桥和悬索桥的塔柱有混凝土结构、钢-混组合结构和钢结构几种类型,塔柱多采用爬模或者塔吊进行施工。对于塔柱高度较高,塔节分段重量较大的钢塔柱安装,采用塔吊的成本很高,工期也长。用一种附壁式自爬升起重机替代传统塔吊,进行桥梁钢塔节段安装,经济效益显著。该起重机通过轨道系统与钢塔进行连接和传递载荷,在吊装钢塔节段工况下,轨道系统与钢塔采用插拔销机构进行锁固,然后进行钢塔节段吊装作业;在爬升工况下,轨道系统的插拔销机构交替动作,在同步顶升机构作用下,起重机可沿轨道爬升和下降。2轨道系统设计根据现有技术的爬模原理,结合液压步履式走行方式,对轨道系统进行结构设计,经过复核优化和工艺设计,明确各部件参数。2.1结构设计根据塔型特点,在塔壁一侧设置两条平行的轨道,具体方式为将锚固座焊接在塔壁上,然后将轨道与锚固座固接。每条轨道由若干个标准节段轨道依次连接组成,轨道上设有等间距的销孔。在相邻轨道对接处设置一锚固座,可将轨道节段拆除和倒换以重复利用。每条轨道设上下两组爬升机构,爬升机构组成见图1,其中顶升座和油缸座分别设置自动插拔销机构,顶升座与起重机主体结构固接,油缸座通过插拔销与轨道相对锁定。通过顶升座和油缸座交替进行插拔销动作,配合顶升油缸同步顶升,即可实现起重机步履式爬升功能。轨道截面采用箱型结构,顶升座和油缸座截面均呈C型,与轨道四周配合,并分别预留一定活动间隙A1、A2和B,见图2。2.1.1支座活动间隙轨道系统的关键之一在于活动间隙的设置,既要保证图1爬升机构组成图2轨道系统截面图DOI:10.13824/j.cnki.cmtm.2023.01.0122023.01建设机械技术与管理83产品结构起重机在爬升过程中各支座与轨道之间有足够的活动余量,还要保证整机爬升过程中不会产生较大的晃动和重心位置变化。因此,...