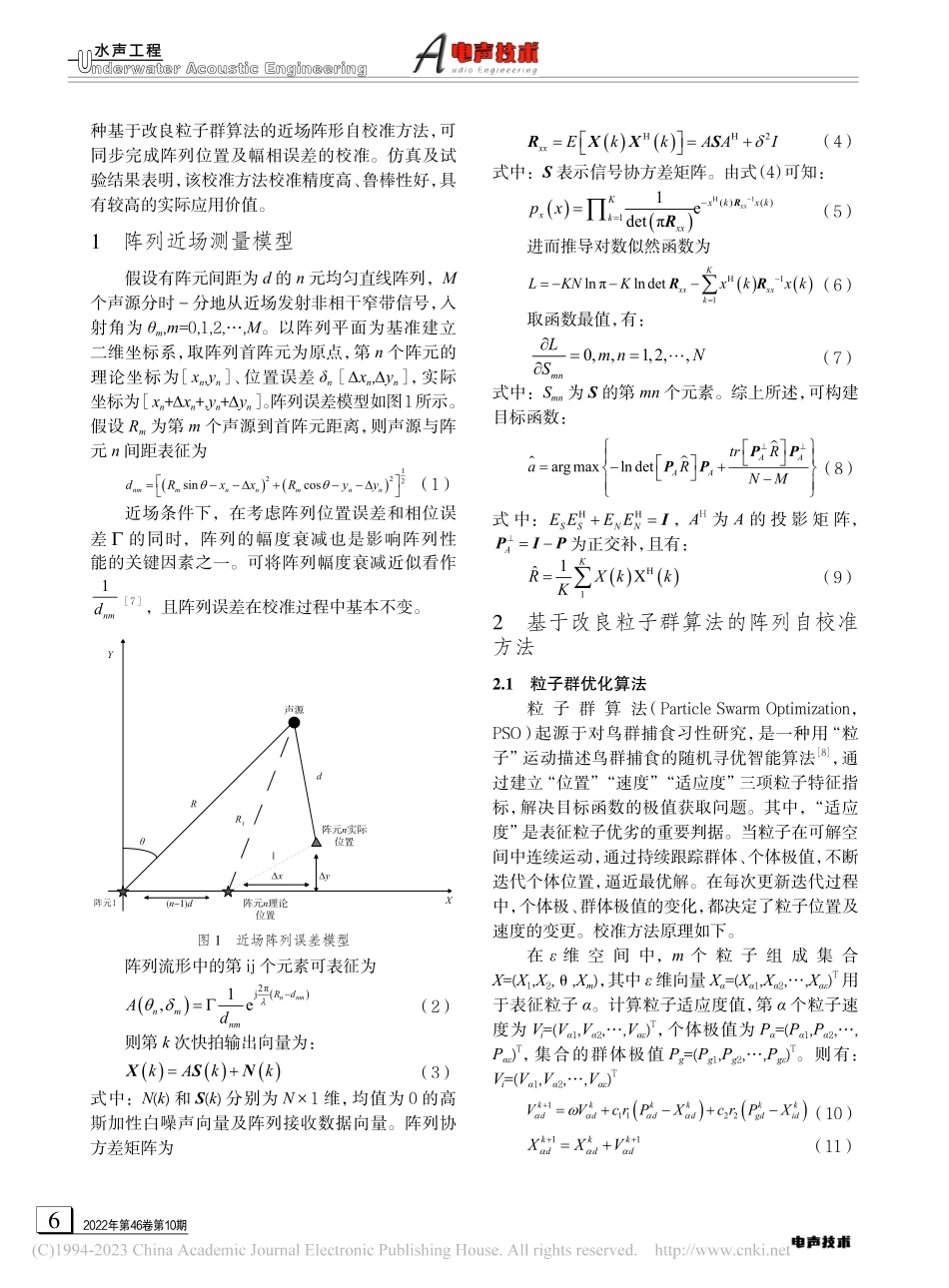
2022年第46卷第10期5UnderwaterAcousticEngineerinG水声工程文献引用格式:李光远.一种基于改良粒子群算法的近场阵列自校准方法[J].电声技术,2022,46(10):5-10.LIGY.Anear-fieldarrayself-calibrationmethodbasedonimprovedparticleswarmoptimizationalgorithm[J].AudioEngineering,2022,46(10):5-10.中图分类号:TN912.1文献标识码:ADOI:10.16311/j.audioe.2022.10.002一种基于改良粒子群算法的近场阵列自校准方法李光远(大连测控技术研究所,辽宁大连116013)摘要:针对存在位置及幅相误差的大尺度直线阵列,提出一种基于改良粒子群算法的近场阵列位置-幅相误差联合自校准方法。该方法采用三校准源分时、分地工作模式、UML-PSO联合寻优方式,针对校准源位置未知的情况构建目标函数并进行寻优。仿真及试验验证了该算法可应用于实测,且具有较好的性能。关键词:噪声源定位;粒子群算法;近场自校准;无条件最大似然估计算法ANear-FieldArraySelf-CalibrationMethodBasedonImprovedParticleSwarmOptimizationAlgorithmLIGuangyuan(DalianScientificTest&ControlTechnologyInstitute,Dalian116013,China)Abstract:Aimingatthelargescalelineararraywithpositionandamplitudephaseerrors,ajointpositionamplitudephaseerrorselfcalibrationmethodfornear-fieldarraybasedonimprovedparticleswarmoptimizationalgorithmisproposed.Thismethodusesthreecalibrationsourcestoworkinatime-sharingandlandsharingmode,andusestheUML-PSOjointoptimizationmethodtobuildanobjectivefunctionandoptimizeitwhenthelocationofthecalibrationsourceisunknown.Throughsimulationandexperimentalverification,itisverifiedthatthealgorithmcanbeappliedtoactualmeasurementandhasgoodperformance.Keywords:noisesourcelocation;particleswarmoptimization;nearfieldself-calibration;unconditionalmaximumlikelihoodestimationalgorithm0引言二十一世纪以来,水下阵列信号处理技术发展迅猛,在舰船噪声源精细化识别、海洋环境常态化监测、海洋勘探等领域接连取得突破。作为阵列信号处理的重要方向,波达方向估计技术(DirectionofArrival,DOA)主要用于对空间中声源的位置进行精确估计。DOA代表性方法包括多重信号分类[1](MUSIC)算法、最大似然(ML)算法以及信号参数估计旋转不变技术(ESPRIT)算法[2]等。但在实际海上测试中,由于系统...