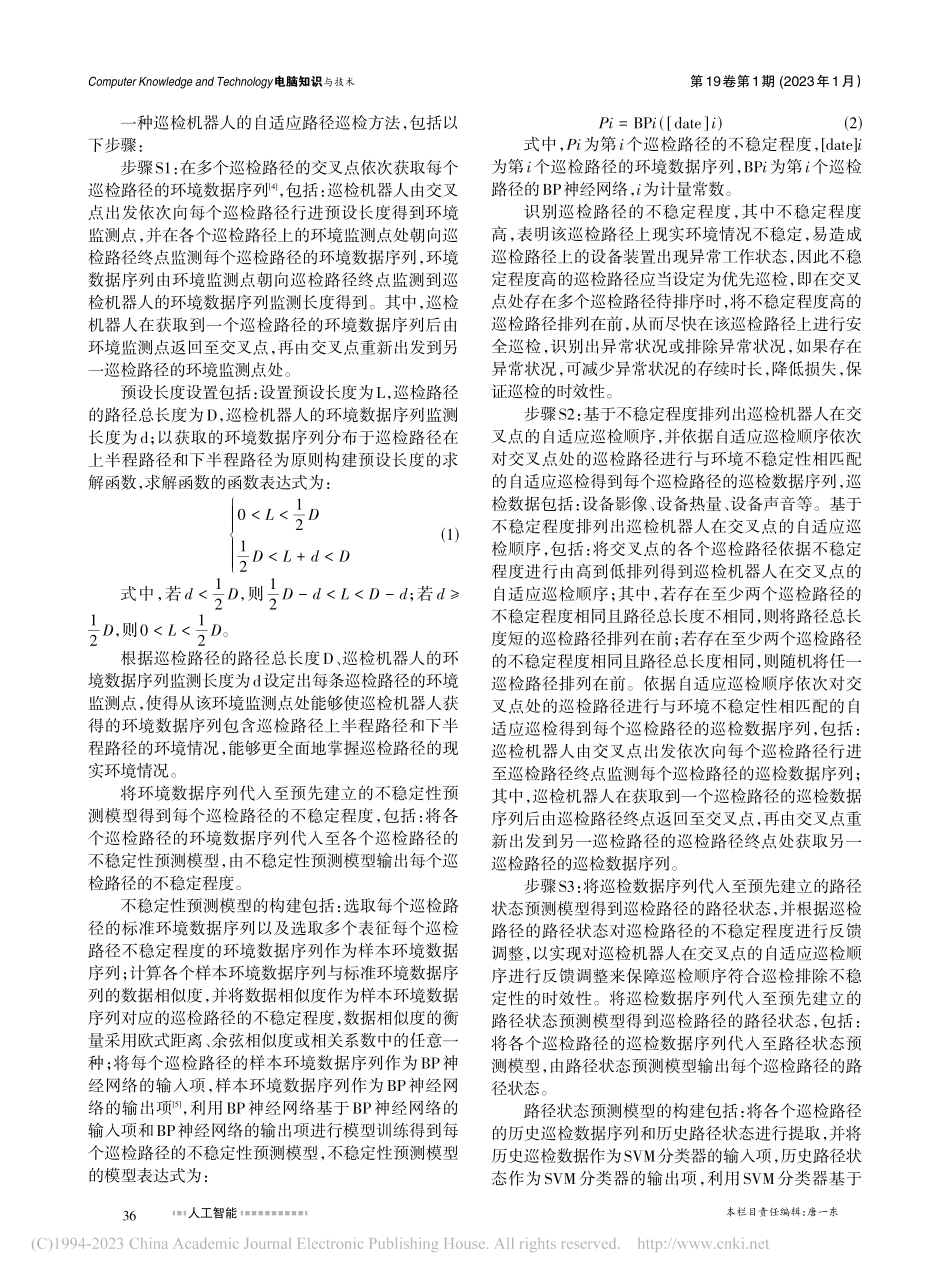
人工智能本栏目责任编辑:唐一东ComputerKnowledgeandTechnology电脑知识与技术第19卷第1期(2023年1月)一种巡检机器人自适应路径巡检方法的研究程晶晶,周明龙(安徽机电职业技术学院,安徽芜湖241000)摘要:一种巡检机器人的自适应路径巡检方法,依据自适应巡检顺序依次对交叉点处的巡检路径进行与环境不稳定性相匹配的自适应巡检,得到每个巡检路径的巡检数据序列,将巡检数据序列代入至预先建立的路径状态预测模型,得到巡检路径的路径状态,并根据巡检路径的路径状态对巡检路径的不稳定程度进行反馈调整,实现了对巡检机器人在交叉点的自适应巡检顺序进行反馈调整来保障巡检顺序符合巡检排除不稳定性的时效性。关键词:巡检机器人;路径巡检;自适应中图分类号:F270文献标识码:A文章编号:1009-3044(2023)01-0035-03开放科学(资源服务)标识码(OSID):随着机器人技术的快速发展,巡检机器人在工业、农业、医疗、军事以及社会服务业等领域得到广泛运用[1],特别是以巡检机器人为载体,搭载红外热成像仪、可见光摄像头等设备完成与故障监测、设备监控等相关的工作任务,具有广阔的应用前景和实用价值。在移动机器人相关技术研究中,移动机器人路径跟踪必须具有高可靠性,并且适应强磁、强辐射、高寒、高压等特殊环境。电磁感应巡线是目前用于巡检机器人最可靠的导航方案。电磁感应巡检是利用设置在机器人上的电磁感应传感器不断感应铺设在巡检路径上的磁条,以保证机器人始终行驶在既定的巡检路径上,磁条是永磁铁,不受环境光线、温度、湿度、天气条件、场地路面的影响[2]。但是现有技术中,机器人自动运行,运行过程中操作人员并不能直观地确定机器人的当前巡检路段,导致巡检路径顺序无法依据现实情况合理规划,不能保障巡检时效性。1一种巡检机器人自适应路径巡检方法的技术方案为解决现有技术中巡检路径顺序无法依据现实情况合理规划,不能保障巡检时效性的技术问题,文章提出了一种巡检机器人自适应路径巡检方法,主要是在多个巡检路径的交叉点依次获取每个巡检路径的环境数据序列[3],通过不稳定性预测模型得到每个巡检路径的不稳定程度,排列出巡检机器人在交叉点的自适应巡检顺序,依次对交叉点处的巡检路径进行与环境不稳定性相匹配的自适应巡检得到每个巡检路径的巡检数据序列,代入至预先建立的路径状态预测模型得到巡检路径的路径状态,对巡检路径的不稳定程度进行反馈调整,以保障巡检顺序符合巡检排除不稳定性的时效性。2一种...