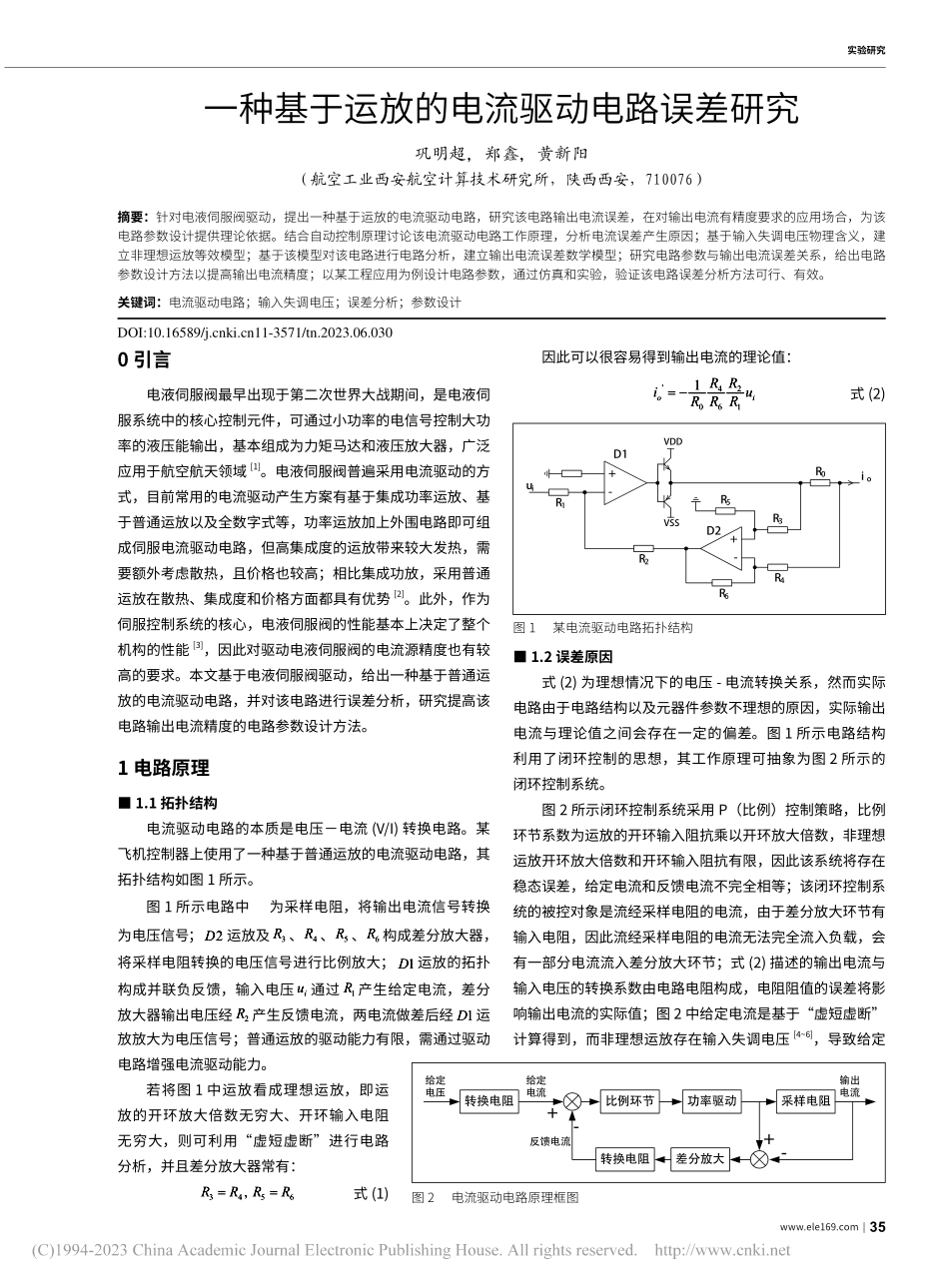
www.ele169.com|35实验研究0引言电液伺服阀最早出现于第二次世界大战期间,是电液伺服系统中的核心控制元件,可通过小功率的电信号控制大功率的液压能输出,基本组成为力矩马达和液压放大器,广泛应用于航空航天领域[1]。电液伺服阀普遍采用电流驱动的方式,目前常用的电流驱动产生方案有基于集成功率运放、基于普通运放以及全数字式等,功率运放加上外围电路即可组成伺服电流驱动电路,但高集成度的运放带来较大发热,需要额外考虑散热,且价格也较高;相比集成功放,采用普通运放在散热、集成度和价格方面都具有优势[2]。此外,作为伺服控制系统的核心,电液伺服阀的性能基本上决定了整个机构的性能[3],因此对驱动电液伺服阀的电流源精度也有较高的要求。本文基于电液伺服阀驱动,给出一种基于普通运放的电流驱动电路,并对该电路进行误差分析,研究提高该电路输出电流精度的电路参数设计方法。1电路原理■1.1拓扑结构电流驱动电路的本质是电压-电流(V/I)转换电路。某飞机控制器上使用了一种基于普通运放的电流驱动电路,其拓扑结构如图1所示。图1所示电路中为采样电阻,将输出电流信号转换为电压信号;2D运放及3R、4R、5R、6R构成差分放大器,将采样电阻转换的电压信号进行比例放大;1D运放的拓扑构成并联负反馈,输入电压iu通过1R产生给定电流,差分放大器输出电压经2R产生反馈电流,两电流做差后经1D运放放大为电压信号;普通运放的驱动能力有限,需通过驱动电路增强电流驱动能力。若将图1中运放看成理想运放,即运放的开环放大倍数无穷大、开环输入电阻无穷大,则可利用“虚短虚断”进行电路分析,并且差分放大器常有:3456,RRRR==式(1)因此可以很容易得到输出电流的理论值:'420611oiRRiuRRR=−式(2)VDDVSS+-uiio+-R1D2R2R6R4R0R3R5D1图1某电流驱动电路拓扑结构■1.2误差原因式(2)为理想情况下的电压-电流转换关系,然而实际电路由于电路结构以及元器件参数不理想的原因,实际输出电流与理论值之间会存在一定的偏差。图1所示电路结构利用了闭环控制的思想,其工作原理可抽象为图2所示的闭环控制系统。图2所示闭环控制系统采用P(比例)控制策略,比例环节系数为运放的开环输入阻抗乘以开环放大倍数,非理想运放开环放大倍数和开环输入阻抗有限,因此该系统将存在稳态误差,给定电流和反馈电流不完全相等;该闭环控制系统的被控对象是流经采样电阻的电流,由于差分放大环节有输入电阻,因此流经采样电阻的电流无法完全流入负载,会有一部分...